
I denne vejledning gennemgår vi alle trinene til at konvertere en robot fra en eksisterende 3-hjulet robot med passivt forhjul til en 4-hjulet version ved at installere eftermonteringspakken med dobbelt forhjul.
Nødvendige værktøjer
For at gennemføre denne vejledning skal du bruge følgende værktøjer:- Et sæt skruenøgler eller skraldenøgler
- En boremaskine, inklusive metalbor med lille diameter
- En dynamometrisk topnøgle, der kan nå 30, 50 og 102 Nm drejningsmoment
- Loctite 243
Ekstra materiale:
- To firkantede træklodser, ca. 30 cm høje
TRIN FOR TRIN-GUIDE
TRIN 1
Hæv trækbjælken, så du får plads nok til at placere to træklodser lige under aktuatorerne på værktøjsbjælken (se billedet nedenfor).
Sænk nu trækbjælken, indtil robottens forhjul løfter sig fra jorden.

TRIN 2
Løsn den røde sikkerhedsledning fra den forreste sikkerhedsarm, og lad den ligge på jorden.

TRIN 3
Fjern de fire nitter, der holder de sorte propper i hver ende af robottens forreste hovedramme. Brug et metalbor med lille diameter til at fuldføre trinnet.

TRIN 4
Fjern boltene, der holder venstre og højre sikkerhedsstang foran. Der er otte bolte i alt, fire i hver side af robotten.

TRIN 5
Fjern venstre og højre forreste sikkerhedsbøjle ved at skubbe dem ud af rammen.

TRIN 6
Fjern det passive forhjul ved at fjerne låsetappen samt de øverste og nederste monteringsbolte.
Sørg for at få en anden person til at hjælpe dig med at holde forhjulet på plads, ellers risikerer du at bøje boltene.

TRIN 7
Monter den dobbelte forhjulsbom. Påfør Loctite 243 på gevindet på monteringsstangen.

TRIN 8
Spænd de øverste og nederste bolte med en momentnøgle, der er indstillet til 102NM

TRIN 9
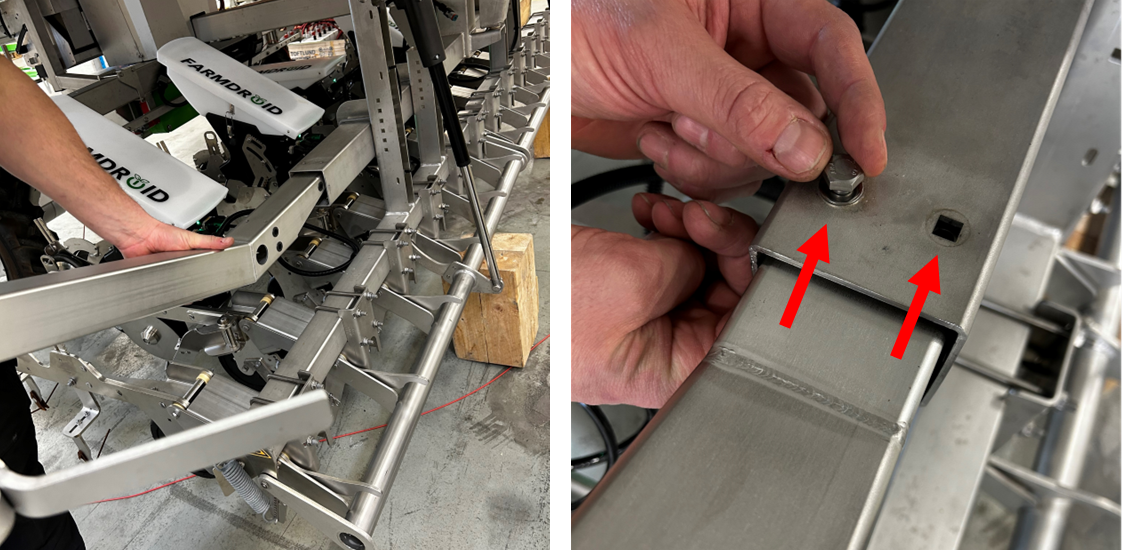
Fjern muffebøsningen i den øverste modtagerarm på hovedrammen

TRIN 10
Monter den nyligt modtagne låsestift til dobbelt forhjulsstøtte.
Bemærk, at de bøsninger, der er vist på billedet, skal fjernes.

TRIN 11
Monter hvert af de to forhjul i henhold til konfigurationens hjulafstand. Vær opmærksom på, at begge forhjul skal være lige langt fra midten af bommen.

TRIN 12
Fastgør de to forhjulsenheder med to bolte i hver side.
Boltene skal spændes med et moment på 50NM.

TRIN 13
Saml de nye sikkerhedsbøjler ved at skubbe dem ind i rammen, og fastgør dem derefter med de to øverste bolte og spænd dem med et moment på 30 Nm.
Det er vigtigt IKKE at starte med de nederste bolte.
TRIN 14
Monter og fastgør også de to nederste bolte. Spænd også dem med et moment på 30NM.

TRIN 15
Monter den forreste sikkerhedsarm, og fastgør den med en bolt

TRIN 16
Sæt den nye sikkerhedswire på og fastgør den. Vent med at foretage den endelige stramning.

TRIN 17
Før ledningen gennem sikkerhedsbøjlesystemet

TRIN 18
Stram sikkerhedswiren i både start- og slutposition, indtil markøren er mellem linjerne.

TRIN 19
Fjern alt værktøj og alle dele fra arbejdsområdet, før du sænker robotten.
TRIN 20
Brug låsemekanismen på hvert forhjul til at frigøre gaflernes rotation om deres lodrette akse

TRIN 21
Lås bommen på det dobbelte forhjul op ved at flytte tappen fra den låste position (den røde side af klistermærket) til den ulåste position (den grønne side af klistermærket). Dette gør det muligt for forhjulsbommen at bevæge sig efter terrænets overflade.

TRIN 22
Sænk robotten på jorden ved at hæve anhængertrækket
TRIN 23
Robotten er nu klar til brug med den dobbelte forhjulsopsætning