
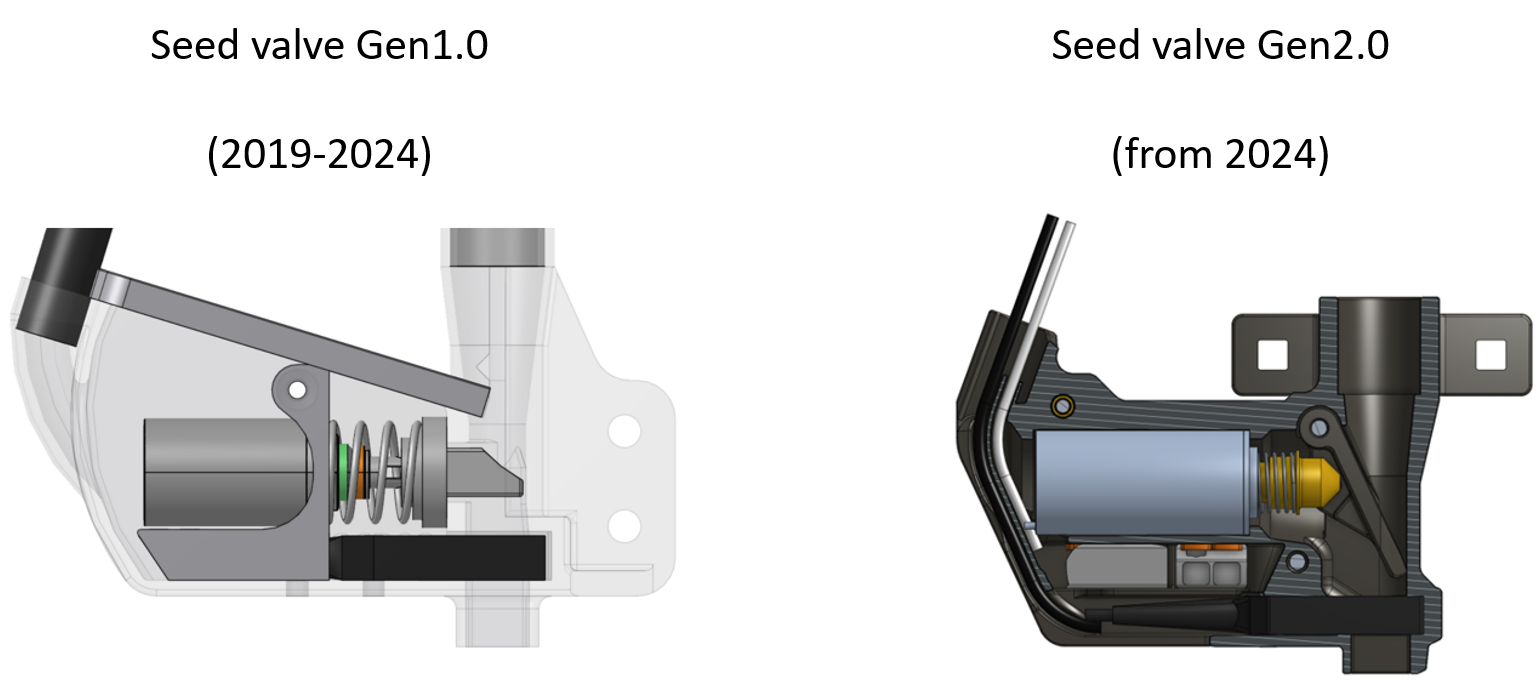
UPG19V2.0-2.5 ist die Baugruppe, die du brauchst, um dein Saatgutventil von GEN1.0 auf GEN2.0 aufzurüsten.
Schau dir das Bild unten als Referenz an:
Die Werkzeuge, die du zum Lösen der Aufgabe brauchst, sind:
- Einen 8-mm-Steckschlüssel
- Ein mittelgroßer Kreuzschlitzschraubendreher
- Ein Glasfaserschneider (p/n FU-CUTTER2)
NACHRÜSTVERFAHREN
Behandle die schwarzen Glasfaserkabel während des gesamten Vorgangs mit Vorsicht. Wenn du sie stark verbiegst, können die Fasern brechen und der Lichtsensor muss ausgetauscht werden.
SCHRITT 1
Schalte den Roboter komplett aus, indem du sowohl den Hauptschalter als auch den Schalter der Solarzellen ausschaltest.
SCHRITT 2
Benutze einen 8-mm-Steckschlüssel, um das Gehäuse des alten Saatventils von der Säeinheit zu lösen. Schraube dann alle 7 Kreuzschlitzschrauben aus dem Gehäuse, um an das Magnetventil zu gelangen, und trenne alle elektrischen Anschlüsse ab.


SCHRITT 3
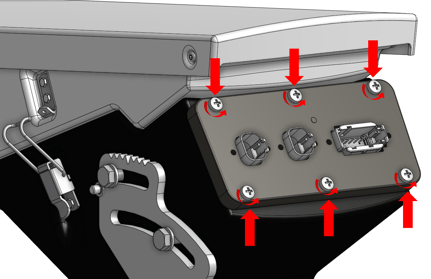
Löse die 6 Kreuzschlitzschrauben an der Vorderseite der Saatguteinheit. Zieh dann die Frontplatte raus, um an die Leiterplatte zu kommen.
SCHRITT 4
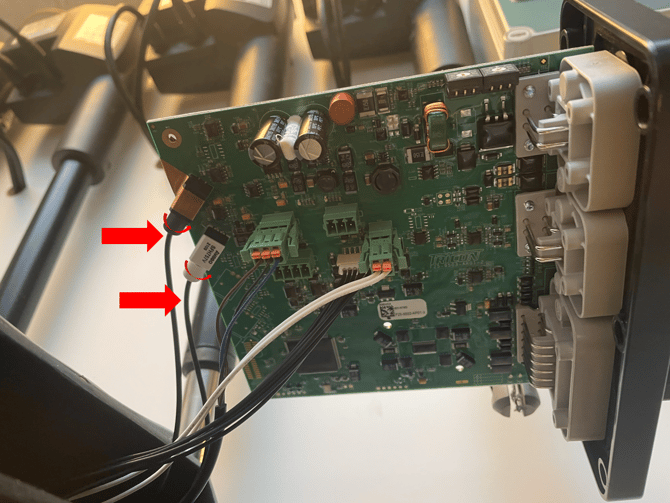
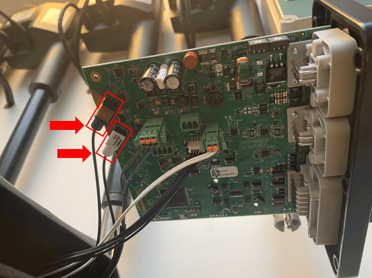
Zieh die beiden Glasfaserkabel des Lichtsensors von der Leiterplatte ab, indem du:
-
Löse den Rundverschluss von der Leiterplatte (erstes Bild unten).
-
Zieh die Kabel vorsichtig aus dem schwarzen Abdeckrohr raus (zweites Bild unten).
SCHRITT 5
Löse die beiden TX10-Schrauben an der Seite der neuen Saatventilbaugruppe, um an die Bauteile zu gelangen.

SCHRITT 6
Suche die weißen elektrischen Anschlussdrähte, die vom Hauptschaltkasten der Säeinheit ausgehen. Führe sie durch die Öffnung der neuen Saatventilbaugruppe und vergewissere dich, dass sie sicher mit dem Magnetventil verbunden sind. Orientiere dich dabei an den folgenden Bildern.


SCHRITT 7
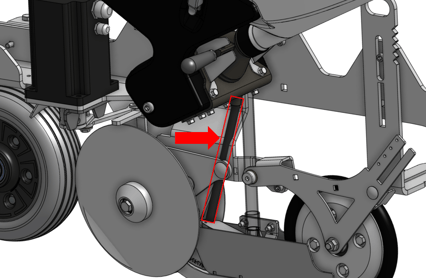
Schieb den Lichtsensor in die Saatventilbaugruppe in Richtung der Öffnung des Saatventils, wie auf den Bildern unten dargestellt.


Die Glasfaserkabel sollten einzeln durch den hinteren Laufkanal geführt werden. Sobald beide Kabel positioniert sind, werden sie durch die Konstruktion des Steckplatzes sicher gehalten.

SCHRITT 8
Sobald der Lichtsensor an seinem Platz ist, versiegle die seitliche Öffnung des Saatventils.


SCHRITT 9
Führe die beiden Lichtsensorkabel vorsichtig durch die schwarze Kabelverschraubung und in den Schaltkasten des Sägeräts.
Stell sicher, dass die Glasfaserkabel richtig in die schwarzen und weißen Sensoren reingesteckt sind, bevor du sie festmachst.
Wenn dein Roboter beim Checken der Aussaatfehlerwerte in der HMI viel „Staub“ findet, könnte das an folgenden Sachen liegen:
-
Die Lichtwellenleiter sind nicht richtig in die Sensoren reingesteckt.
-
Die Spitze der Glasfaser wurde vor dem Einstecken in den Sensor nicht mit dem Cutter abgeschnitten.
-
Die Glasfaser ist kaputt, weil jemand sie falsch behandelt hat:
VORSICHT 😊👇
Bevor du die Lichtsensorkabel an der Platine befestigst, schneide 1-2 mm von der Glasfaser ab.
Es ist wichtig, dass du für diese Aufgabe einen Glasfaserschneider verwendest. Vermeide es, ein Sicherheitsmesser oder eine unspezifische Klinge zu verwenden, da sie keinen sauberen Schnitt ermöglichen, wie in den folgenden Bildern zu sehen ist.
Wenn du einen Glasfaserschneider von FarmDroid kaufen möchtest, suche nach dem Teil FU-CUTTER2.



SCHRITT 10
Befestige die Platine der Säeinheit wieder, indem du die sechs Kreuzschlitzschrauben anziehst (siehe Schritt 3). Befestige dann die Saatventilbaugruppe mit den beiden 8-mm-Muttern an der Basis der Säeinheit (siehe Schritt 2).
SCHRITT 11
Schalte den Roboter ein und überprüfe die ordnungsgemäße Funktion des Saatventils mit dem MANUELLEN FUNKTIONSTEST.