
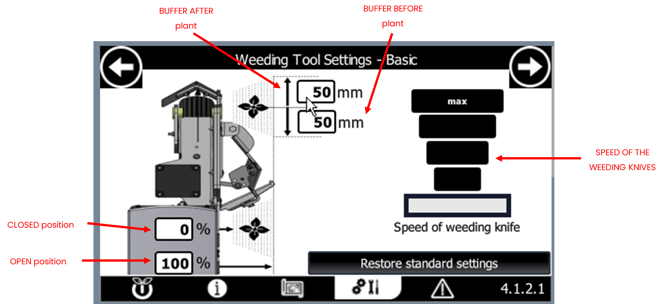
Les réglages de désherbage du robot sont accessibles à la page 4.1.2.1 "Réglages de l'outil de désherbage - Base".
Pour obtenir une performance de désherbage optimale, il est essentiel de respecter les 6 paramètres clés décrits ci-dessous.
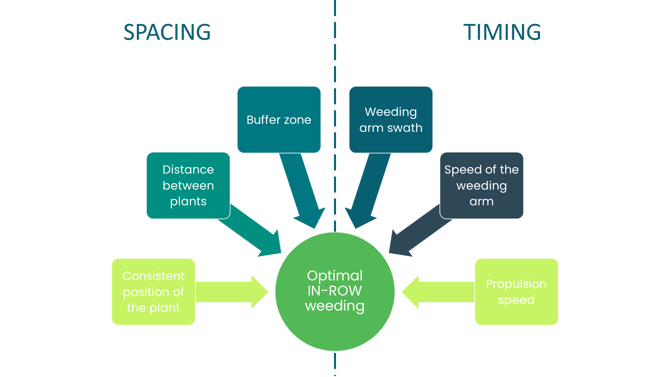
- POSITION CONSTANTE DES PLANTES : il s'agit du principal paramètre à surveiller de près. L'obtention d'une position constante des plantes dépend d'une préparation minutieuse du champ et d'un réglage précis du robot de semis.
- DISTANCE ENTRE LES PLANTES : Pour permettre un désherbage efficace dans les rangs, assurez une distance minimale de 10 cm entre chaque graine.
- LA TAILLE DE LA ZONE TAMPON : En règle générale, la zone tampon doit être ajustée au fur et à mesure que la taille de la culture augmente. Gardez à l'esprit que l'extension de la zone tampon réduira la surface disponible dans la rangée pour que le bras de désherbage puisse fonctionner efficacement.
Prenons les deux exemples suivants :
Dans le premier cas, il y a suffisamment d'espace pour que le bras de sarclage puisse entrer et sortir de la rangée en douceur.
Dans ce scénario, la distance d'ensemencement reste inchangée par rapport à l'exemple précédent, mais la zone tampon est nettement plus large, ce qui laisse peu d'espace au bras de désherbage pour entrer et sortir de la rangée. Si vous remarquez des imprécisions de désherbage dans ces conditions, envisagez d'augmenter la vitesse du bras de désherbage ou de réduire légèrement la vitesse de conduite du robot.
- BALAYAGE DU BRAS : Le balayage du bras de désherbage définit l'étendue du mouvement entre la position fermée (par exemple, 0 %) et la position complètement ouverte (par exemple, 100 %). Un andain plus large augmente le temps nécessaire au bras pour terminer son cycle par rapport à un andain plus étroit. Par conséquent, si l'andain est étendu (par exemple, d'une plage de 10-80% à une plage de 0-100%), il est recommandé d'ajuster en conséquence la vitesse du bras de désherbage dans les réglages de la page 4.1.2.1 "Réglages de l'outil de désherbage - Base".
- VITESSE DU BRAS DE DÉSHERBAGE ET VITESSE D'AVANCEMENT DU ROBOT: Ces deux paramètres sont liés et influencent directement l'efficacité opérationnelle et le modèle de désherbage qui en résulte.
-
- L'augmentation de la vitesse du bras de désherbage lui permet de s'ouvrir et de se fermer plus rapidement. Ce réglage est idéal lorsque le robot fonctionne à des vitesses de conduite plus élevées ou lorsqu'un nettoyage précis à proximité de la culture est nécessaire.
- L'augmentation de la vitesse d'avancement du robot lui permet de couvrir une plus grande surface dans le même laps de temps ; cependant, cela nécessite également une augmentation correspondante de la vitesse du bras de désherbage pour maintenir une performance de désherbage complète.
-