
In deze handleiding zullen we alle stappen doorlopen om een robot om te bouwen van een bestaande 3-wiel robot met het passieve voorwiel naar een 4-wiel versie door het Dual Front Wheel retrofit pakket te installeren.
Benodigde gereedschappen
Om deze gids te voltooien heb je het volgende gereedschap nodig:- Een steeksleutel of ratelsleutel
- Een boormachine, inclusief metalen boren met een kleine diameter
- Een dynamometrische dopsleutel met een koppel van 30, 50 en 102 Nm
- Loctite 243
Extra materiaal:
- Twee vierkante houten blokken, ongeveer 30 cm hoog
STAP VOOR STAP HANDLEIDING
STAP 1
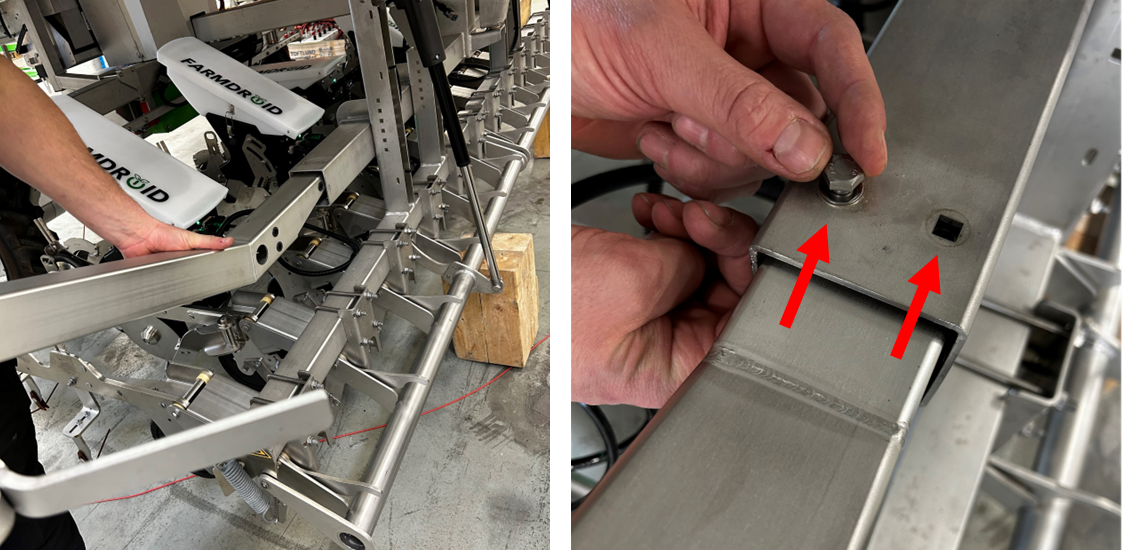
Breng de hefbalk omhoog zodat je genoeg ruimte hebt om twee houten blokken recht onder de actuators van de gereedschapsbalk te plaatsen (zie onderstaande afbeelding).
Laat nu de hefbalk zakken totdat het voorwiel van de robot van de grond komt.

STAP 2
Maak de rode veiligheidskabel los van de voorste veiligheidsarm en laat hem op de grond liggen.

STAP 3
Verwijder de vier klinknagels die de zwarte pluggen aan elk uiteinde van het voorste hoofdframe van de robot vasthouden. Gebruik een metaalboor met een kleine diameter om deze stap te voltooien.

STAP 4
Verwijder de bouten waarmee de veiligheidsstangen links en rechts aan de voorkant vastzitten. Er zijn in totaal acht bouten, vier per kant van de robot.

STAP 5
Verwijder de veiligheidsbeugels links- en rechtsvoor door ze uit het frame te schuiven.

STAP 6
Verwijder het passieve voorwiel door de borgpen en de bovenste en onderste bevestigingsbouten te verwijderen.
Zorg ervoor dat iemand anders je helpt het voorwiel te ondersteunen, anders loop je het risico dat je de bouten verbuigt.

STAP 7
Monteer de dubbele voorwielarm. Breng Loctite 243 aan op de schroefdraad van de montagestang.

STAP 8
Draai de bovenste en onderste bouten vast met een momentsleutel die is ingesteld op 102NM.

STAP 9
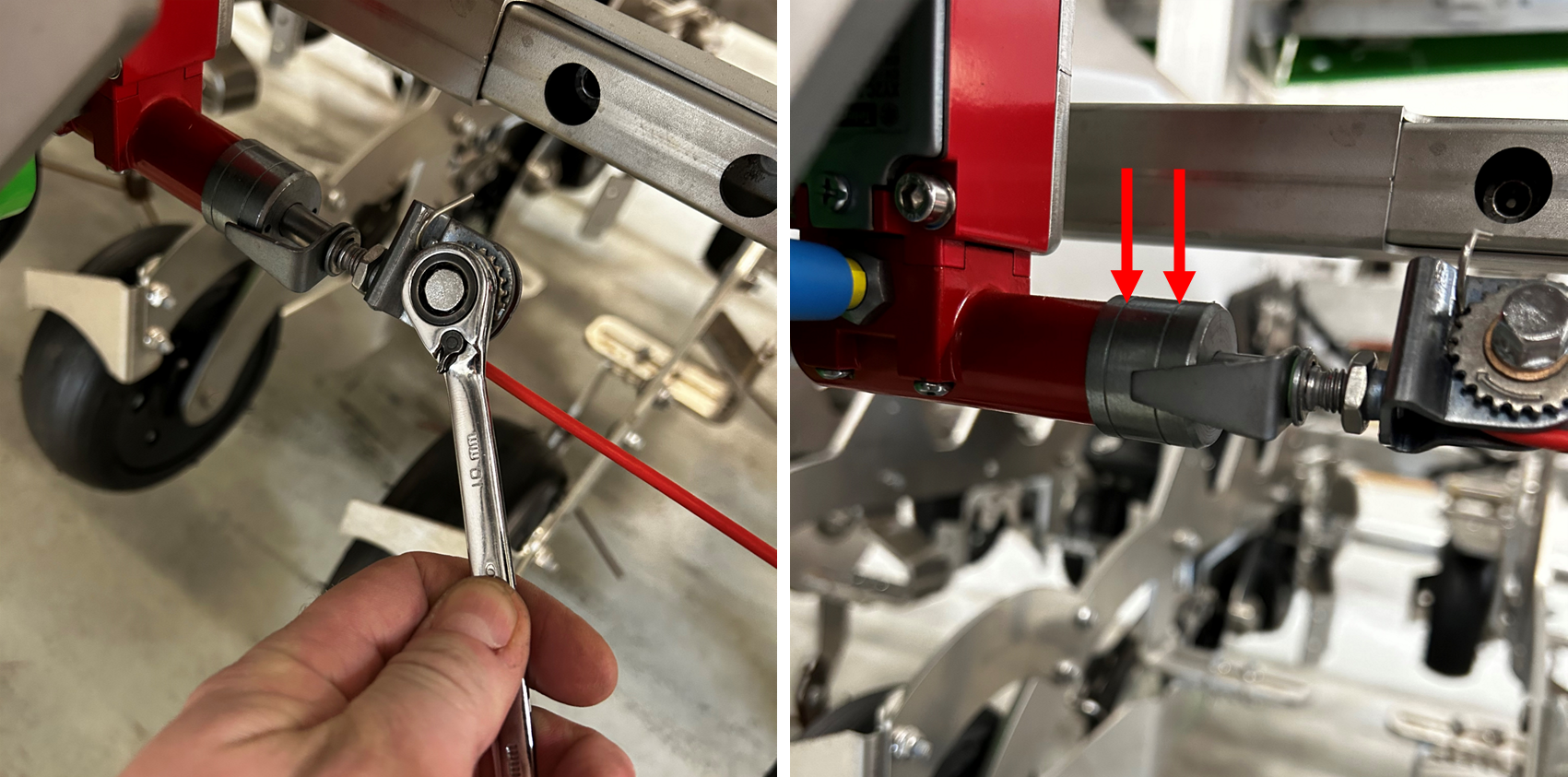
Verwijder de hulsbus in de bovenste ontvangerarm van het hoofdframe

STAP 10
Monteer de pas ontvangen borgpen voor de dubbele voorwielsteun.
Let op: de bussen op de afbeelding MOETEN VERWIJDERD worden.

STAP 11
Monteer elk van de twee voorwielen volgens de wielbasis van de configuratie. Houd er rekening mee dat beide voorwielen even ver van het midden van de giek moeten staan.

STAP 12
Zet de twee voorwielonderdelen vast met twee bouten voor elke kant.
De bouten moeten worden aangedraaid met een koppel van 50 Nm.

STAP 13
Monteer de nieuwe veiligheidsbeugels door ze IN het frame te schuiven en zet ze vervolgens vast met de twee bovenste bouten en draai ze vast met een koppel van 30 Nm.
Het is belangrijk om NIET met de onderste bouten te beginnen.
STAP 14
Monteer ook de twee onderste bouten en zet ze vast. Draai ze ook vast met een aanhaalmoment van 30 Nm.

STAP 15
Monteer de voorste veiligheidsarm en zet hem vast met een bout

STAP 16
Bevestig de nieuwe veiligheidskabel en zet hem vast. Wacht met het definitief vastdraaien.

STAP 17
Leid de draad door het veiligheidsstangenstelsel

STAP 18
Trek de veiligheidskabel zowel in de begin- als in de eindpositie aan totdat de marker tussen de lijnen staat.
STAP 19
Verwijder alle gereedschappen en onderdelen uit het werkgebied voordat u de robot laat zakken.
STAP 20
Gebruik het vergrendelingsmechanisme op de voorwielen om de vorken vrij om hun verticale as te laten draaien.

STAP 21
Ontgrendel de giek van het dubbele voorwiel door de pen van de vergrendelde positie (rode kant van de sticker) naar de ontgrendelde positie (groene kant van de sticker) te bewegen. Hierdoor kan de voorste giek bewegen op basis van het terreinoppervlak.

STAP 22
Laat de robot op de grond zakken door de hefinrichting omhoog te brengen.
STAP 23
De robot is nu klaar voor gebruik met de dubbele voorwielopstelling