
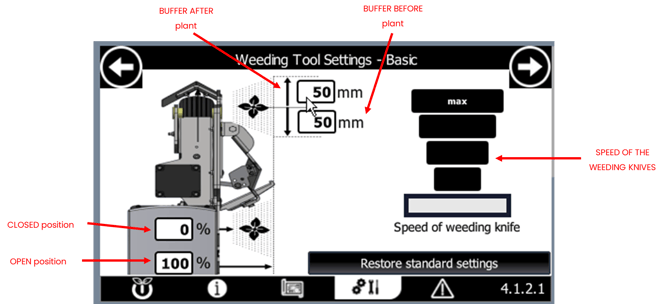
De wiedinstellingen van de robot zijn toegankelijk op pagina 4.1.2.1 "Instellingen wiedgereedschap - Basis".
Voor optimale wiedprestaties is het essentieel om te voldoen aan alle 6 belangrijke parameters die hieronder worden beschreven.
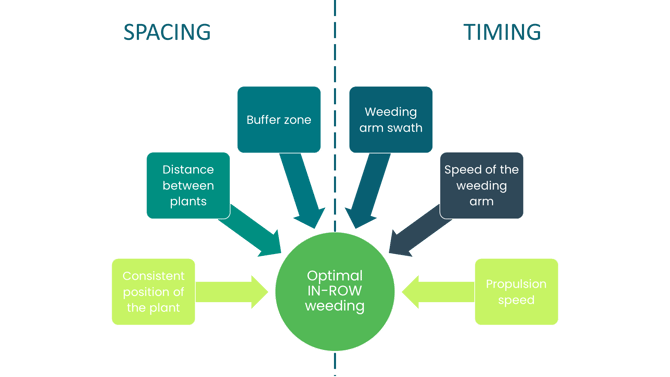
- GECONSISTENTE POSITIE VAN DE PLANTEN: Dit is de primaire parameter die nauwlettend in de gaten moet worden gehouden. Het bereiken van een consistente positie van de planten hangt af van een grondige voorbereiding van het veld en een precieze instelling van de robot bij het zaaien.
- AFSTAND TUSSEN DE PLANTEN: Om effectief wieden in de rij mogelijk te maken, moet je zorgen voor een minimale afstand van 10 cm tussen elk zaadje.
- GROOTTE VAN DE BUFFERZONE: Als algemene richtlijn moet de bufferzone worden aangepast naarmate het gewas groter wordt. Houd er rekening mee dat als je de bufferzone vergroot, het beschikbare rijoppervlak voor de wiedarm kleiner wordt.
Bekijk de twee onderstaande voorbeelden:
In het eerste scenario is er voldoende ruimte voor de wiedarm om soepel in en uit de rij te bewegen.
In dit scenario blijft de zaaiafstand ongewijzigd ten opzichte van het vorige voorbeeld, maar de bufferzone is aanzienlijk breder, waardoor er weinig ruimte overblijft voor de wiedarm om in en uit de rij te manoeuvreren. Als u onnauwkeurigheden bij het wieden opmerkt onder deze omstandigheden, overweeg dan om de snelheid van de wiedarm te verhogen of de rijsnelheid van de robot iets te verlagen.
- ZWAD VAN DE WIERARM: Het zwad van de wiedarm bepaalt de mate van beweging van de gesloten positie (bijv. 0%) naar de volledig geopende positie (bijv. 100%). Een breder zwad verlengt de tijd die de arm nodig heeft om zijn cyclus te voltooien in vergelijking met een smaller zwad. Als het zwad daarom wordt vergroot (bijvoorbeeld van een bereik van 10-80% naar een bereik van 0-100%), wordt aanbevolen om de snelheid van de wiedarm overeenkomstig aan te passen in de instellingen op pagina 4.1.2.1 "Instellingen wiedgereedschap - Basis".
- SNELHEID VAN DE WIEDARM EN RIJSNELHEID VAN DE ROBOT: Deze twee instellingen zijn onderling met elkaar verbonden en beïnvloeden direct zowel de operationele efficiëntie als het resulterende wiedpatroon.
-
- Door de snelheid van de wiedarm te verhogen zal deze sneller openen en sluiten. Deze aanpassing is ideaal wanneer de robot met hogere rijsnelheden werkt of wanneer er een precieze reiniging dicht bij het gewas nodig is.
- Door de rijsnelheid van de robot te verhogen kan hij een groter gebied bestrijken binnen dezelfde tijd; dit vereist echter ook een overeenkomstige verhoging van de snelheid van de wiedarm om grondige wiedprestaties te behouden.
-