Wenn du das Feld gemäß dieser Anleitung Feldeinrichtung 1/2: So erstellst du ein Feld eingerichtet hast, ist es an der Zeit, sich die operativen Einstellungen anzusehen.
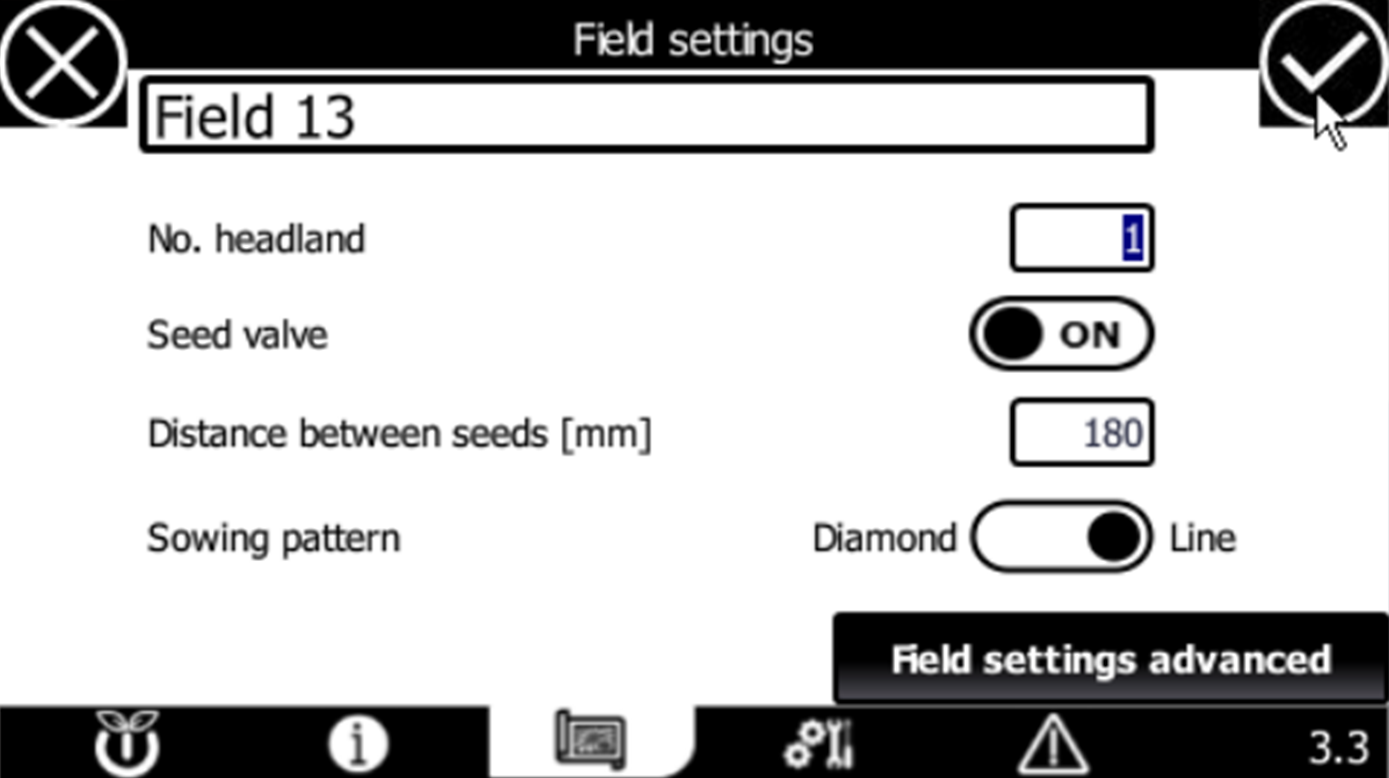
3.3 - FELDEINSTELLUNGEN
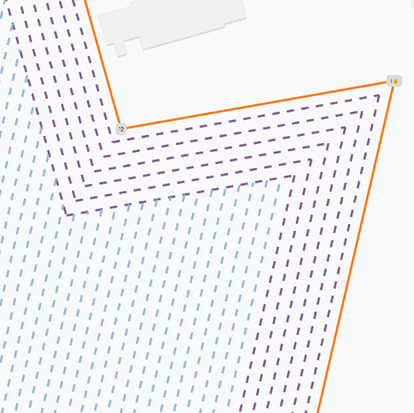
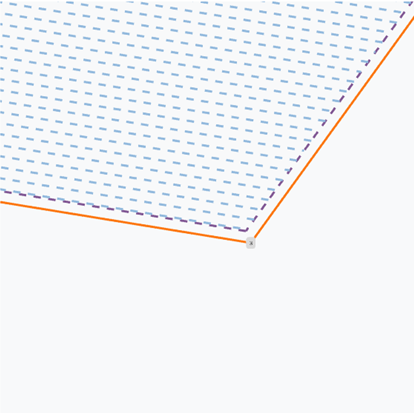
- NO. KOPFGEBIETE
entscheide, wie oft der Roboter dem Feldrand folgen soll.
Das hängt davon ab, wie viel Platz du zwischen dem Feldrand und den Pässen lassen willst (z.B. um den Erntemaschinen genug Platz zum Wenden im Vorgewende zu lassen)
In den Bildern unten siehst du einige praktische Beispiele:
| Nr. Vorgewende: 6 | Anzahl der Vorgewende: 2 | Nr. Vorgewende: 1 |
 |
 |
 |
- SEED-VENTIL
Diese Einstellungen werden dir von FarmDroid bei der Saatgutprüfung zur Verfügung gestellt.- Saatventil EIN: Das Saatventil öffnet und schließt sich automatisch, um die höchste Aussaatgenauigkeit zu erreichen. Du solltest diese Einstellung verwenden, wenn du portionsweise säst (z. B. bei einem Reihenabstand von mehr als 3-4 cm).
- Saatventil AUS: Das Saatventil ist immer offen. Diese Einstellung sollte nur bei einer sehr hohen Saatdichte verwendet werden (z. B. bei einem Reihenabstand von 2-3 cm).
- ABSTAND ZWISCHEN DEN SÄEN
Abstand in Zentimetern zwischen den Samen in derselben Reihe.
HINWEIS 😀👍
Bitte beachte, dass der Mindestabstand zwischen den Samen 10 Zentimeter beträgt, damit du zwischen den Reihen jäten kannst.
- SÄHMUSTER
Du kannst das Aussaatmuster je nach der zu säenden Kultur anpassen


3.3 - FELDEINSTELLUNGEN ERWEITERT
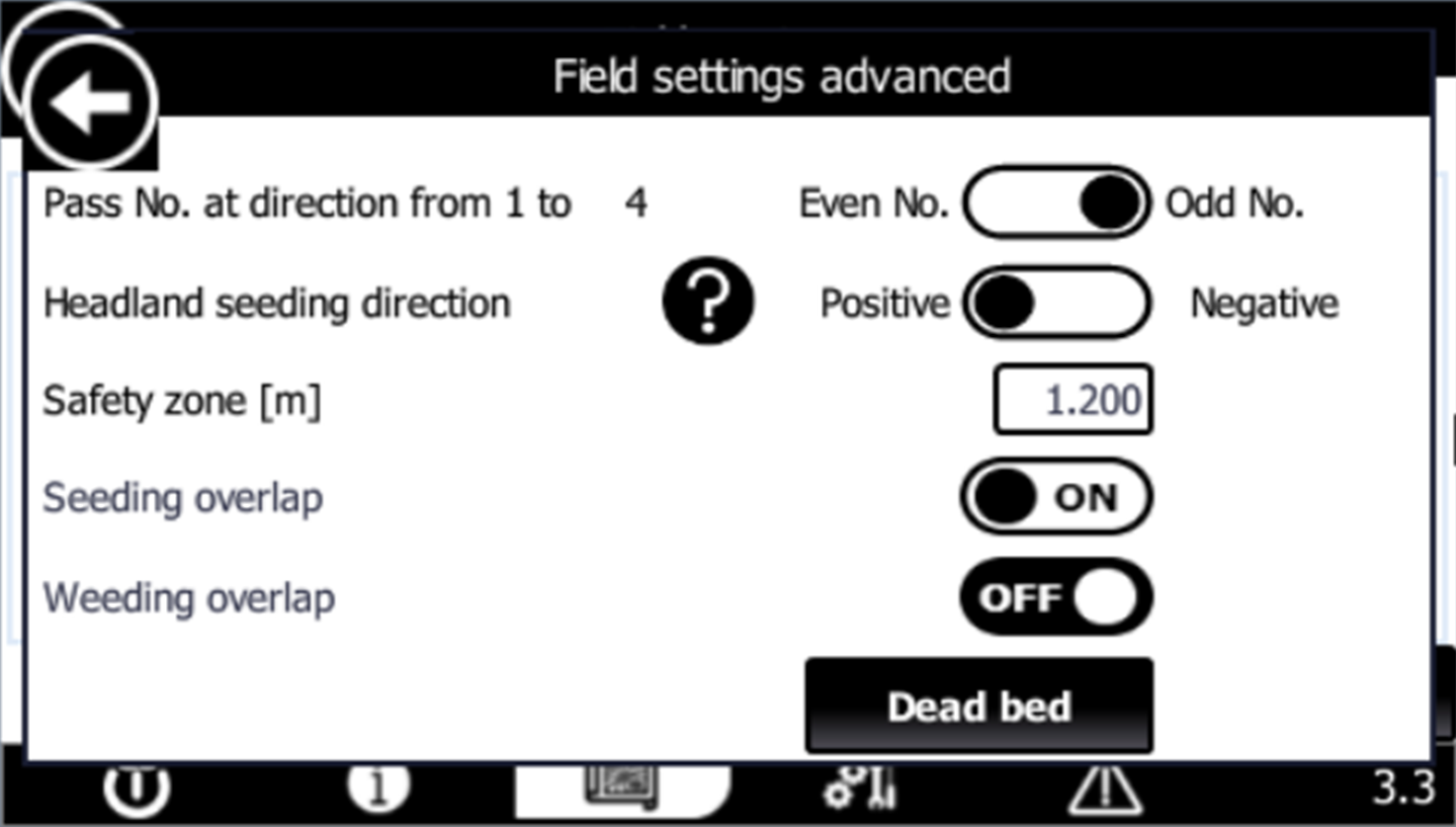
- PASS NR. IN RICHTUNG VON 1 BIS (BEZUGSECKPUNKT)
Entscheide, ob die Richtung des ersten Durchgangs sein soll:- ODD - weg vom Eckpunkt 1 (Standardeinstellung)
- EVEN - zum Eckpunkt 1
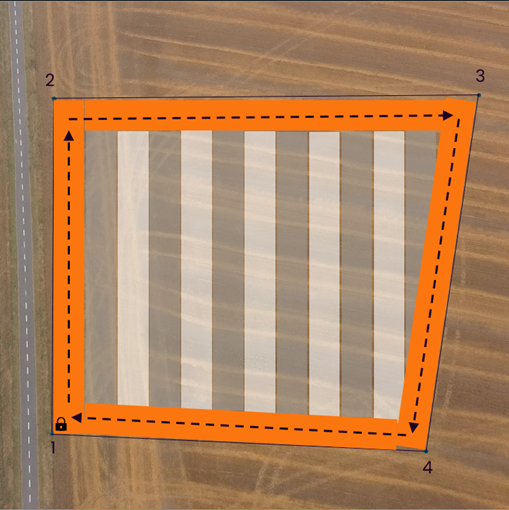
Beispiel in den Bildern unten:
- Das Feld unten hat 4 Eckpunkte
- Die Referenzlinie ist CP1-CP2
- Der Roboter startet von CP1


- SAATRICHTUNG AM VORGEWENDE
Entscheide, in welche Richtung sich der Roboter bewegt, wenn er im Vorgewende arbeitet:- POSITIV - der Roboter bewegt sich zum nächsten Eckpunkt in AUFSTEIGENder Reihenfolge
- NEGATIV - der Roboter bewegt sich zum nächsten Eckpunkt in ABWÄRTS gerichteter Reihenfolge

- SAFETY ZONE
Weitere Informationen findest du im jeweiligen Artikel: Sicherheitszone: ein vollständiger Leitfaden - SEEDING AND WEEDING OVERLAP
Weitere Informationen findest du in dem jeweiligen Artikel: Überlappung von Aussaat und Unkrautbekämpfung
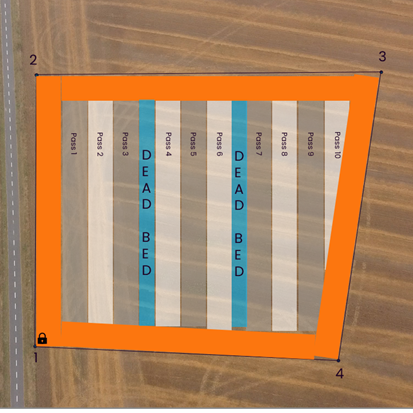
3.3.1 - TOTES BETT
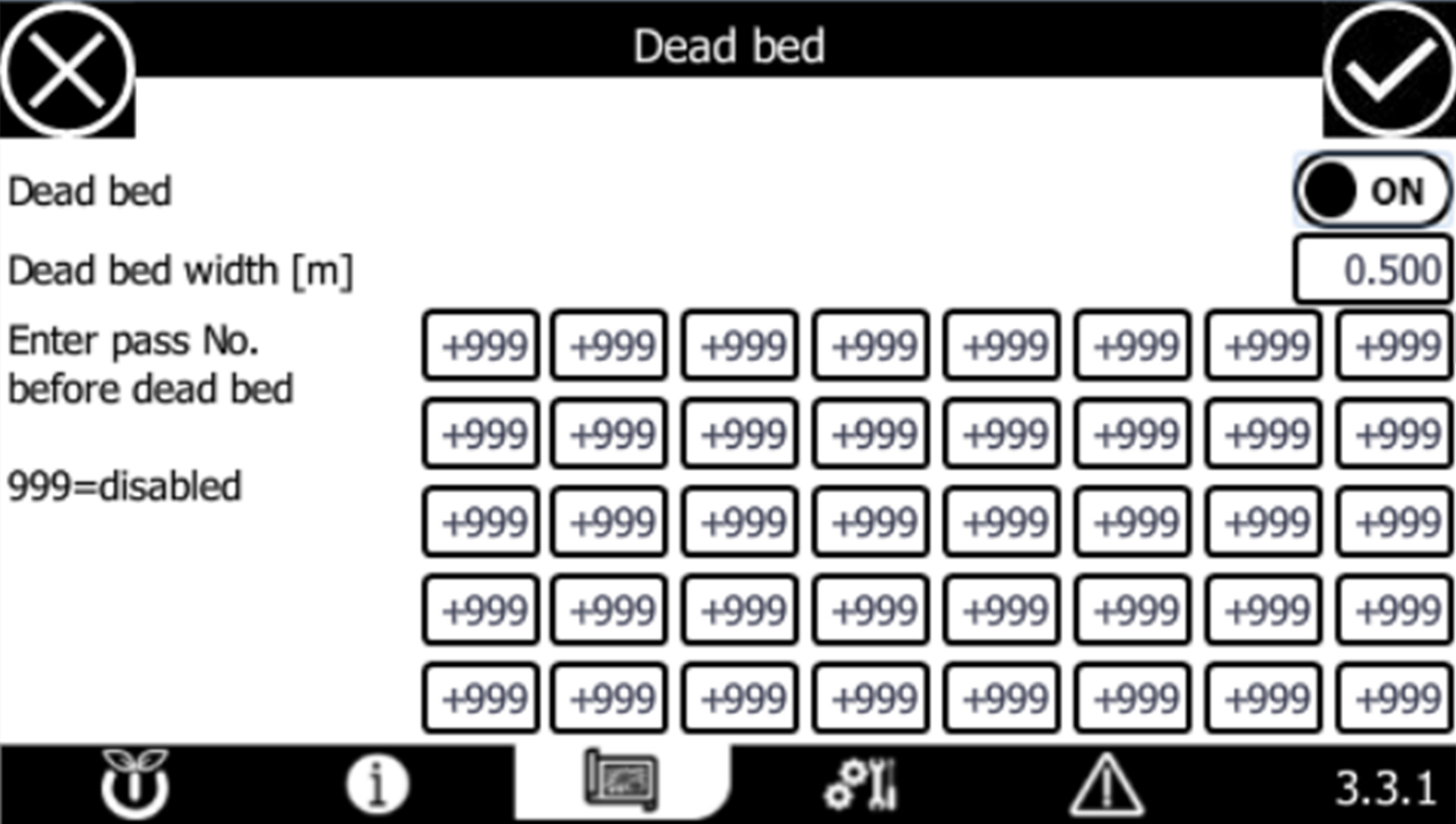
- DEAD BED
Hier kannst du die toten Betten auf dem Feld ein- oder ausschalten. - DEAD BED WIDTH [m]
Gib die Breite eines EINZELNEN Totenbetts ein - PASS NR. EINGEBENBEFORE DEAD BED
Du kannst bis zu 40 tote Betten pro Feld anlegen.
Schreibe einfach die Nummer des Durchgangs VOR dem toten Bett in dieses Raster. Um ein bestimmtes totes Bett zu deaktivieren, füge "999" ein.