Sobald du die Schritte aus der Anleitung ausgeführt hast - EIN FELD 1/2 ERSTELLENabgeschlossen hast, kannst du fortfahren, die Betriebseinstellungen für deinen Roboter anzupassen.
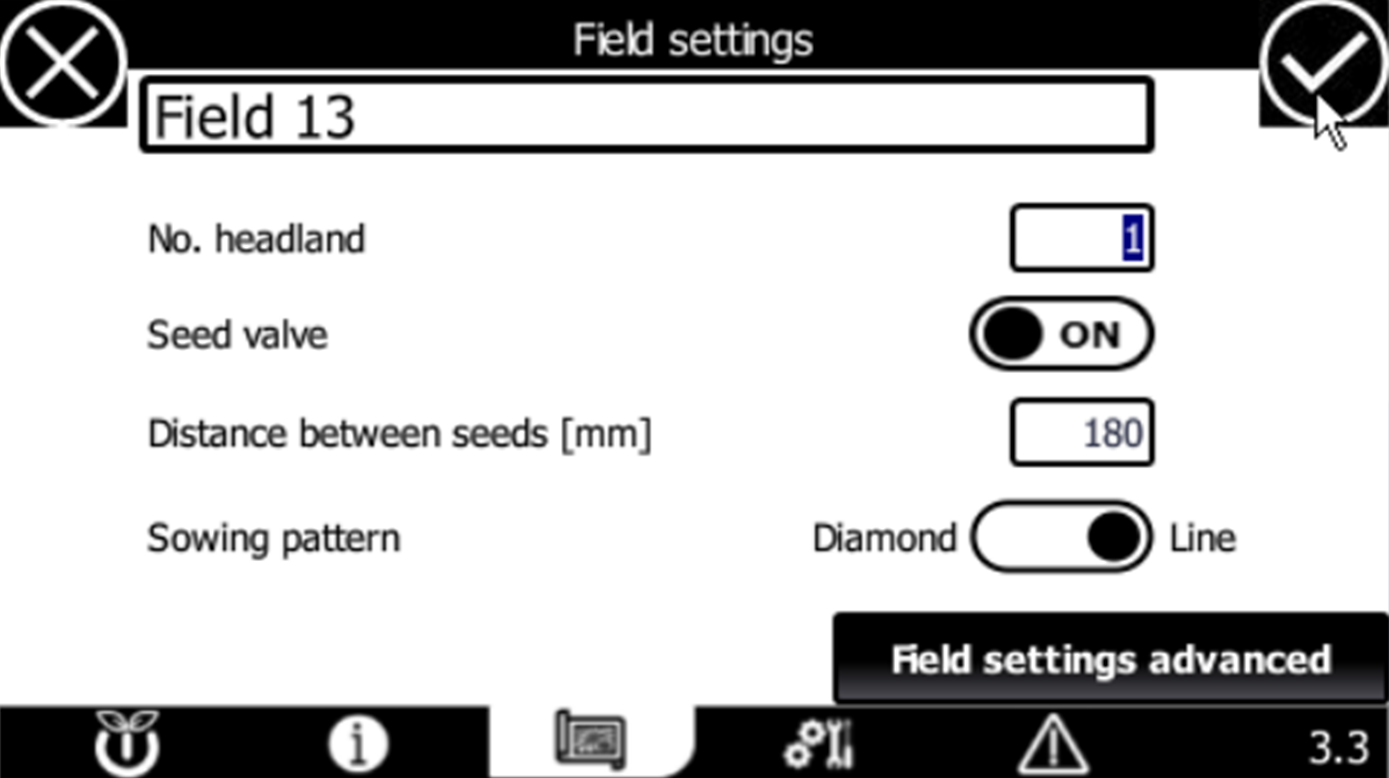
HMI SEITE 3.3 - FELDEINSTELLUNGEN
-
NO. HEADLANDS
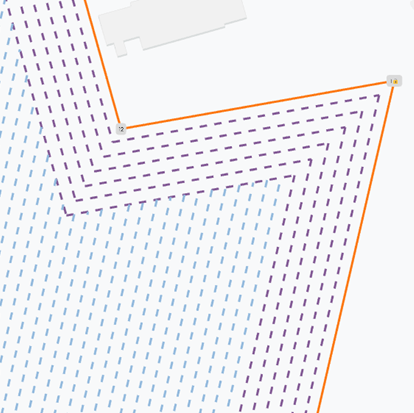
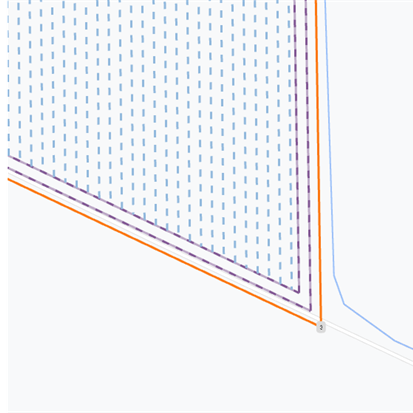
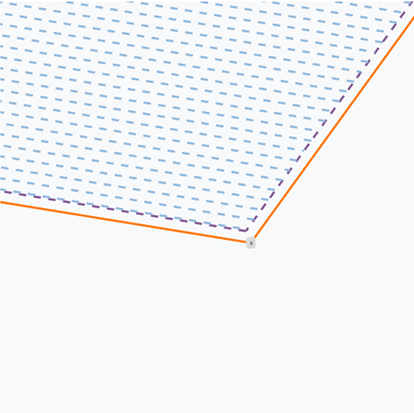
Lege die Anzahl der Vorgewende fest, um zu bestimmen, wie oft der Roboter um den Feldrand fahren soll. Diese Einstellung bestimmt die Breite des Vorgewendebereichs und stellt sicher, dass zwischen dem Feldrand und den Reihen genügend Platz für Aufgaben wie das Wenden von Erntemaschinen bleibt.
Praktische Beispiele findest du in den Bildern unten:
| NO. KOPFLANDS: 6 | NO. KOPFLANDS: 2 | NO. KOPFLANDS: 1 |
 |
 |
 |
-
SEED-VENTIL
Diese Einstellung wird dir von FarmDroid als Teil deiner Saatgut-Testzertifizierung zur Verfügung gestellt.
-
Saatventil EIN: Das Saatventil wird automatisch geöffnet und geschlossen, um eine optimale Aussaatgenauigkeit zu gewährleisten. Verwende diese Einstellung, wenn du portionsweise pflanzt, z. B. wenn der Abstand zwischen den Reihen größer als 3-4 cm ist.
-
Saatventil AUS: Das Saatventil bleibt die ganze Zeit geöffnet. Verwende diese Einstellung nur für eine sehr dichte Aussaat, z. B. wenn der Abstand zwischen den Reihen 2-3 cm beträgt.
-
-
ABSTAND ZWISCHEN DEN SAMEN (MM)
Lege den Abstand (in Millimetern) zwischen den Samen in derselben Reihe fest.
HINWEIS 😀👍
Um das Unkrautjäten zwischen den Reihen zu ermöglichen, muss der Mindestabstand zwischen den Samen mindestens 100 Millimeter betragen.
-
SÄEN-MUSTER
Du kannst das Aussaatmuster an die jeweilige Kultur anpassen, die du anbauen möchtest.


HMI SEITE 3.3 - FELDEINSTELLUNGEN ERWEITERT
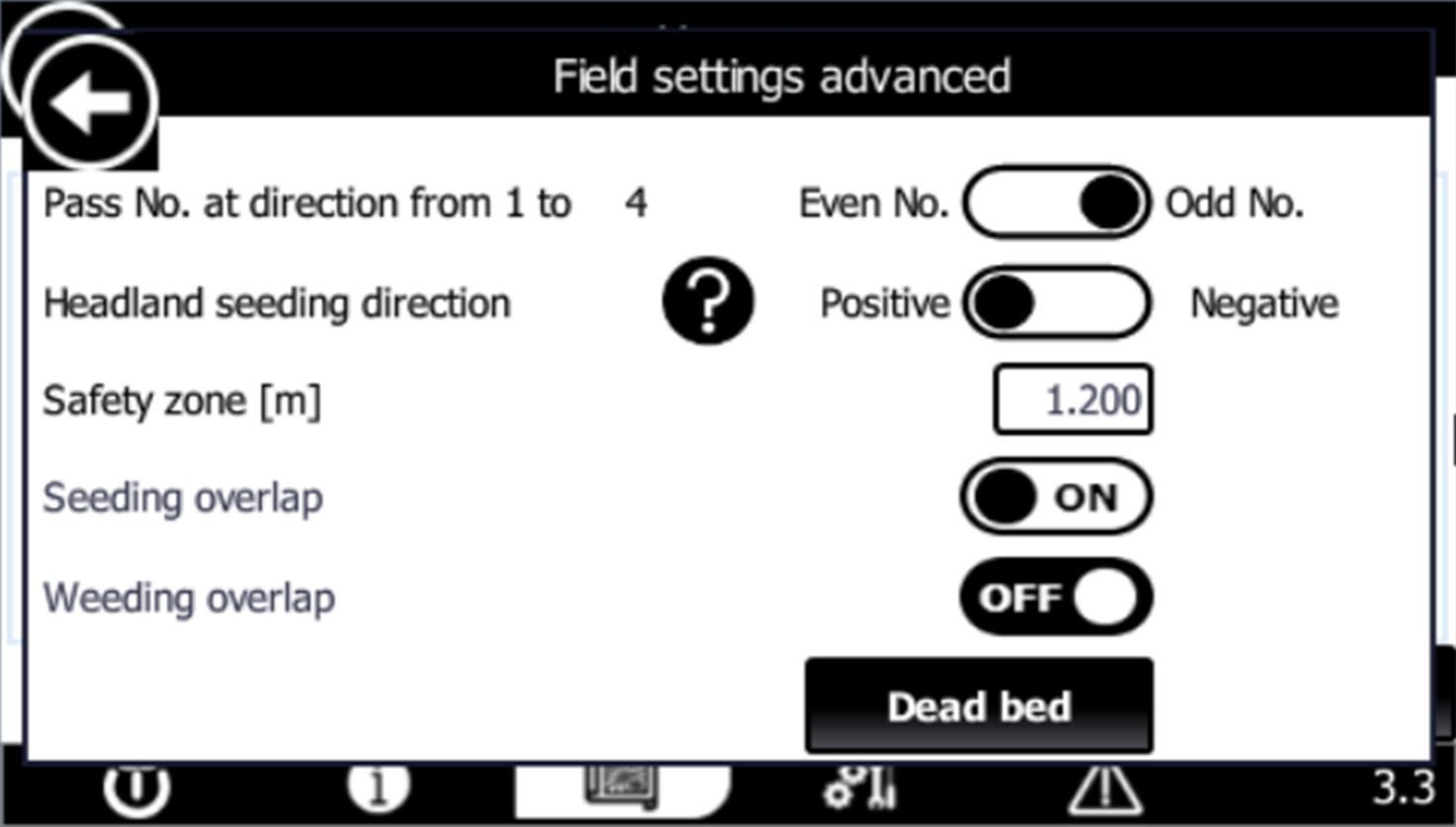
- PASS NR. IN RICHTUNG VON 1 BIS (BEZUGSECKPUNKT)
Wähle die gewünschte Richtung für den ersten Durchgang des Roboters:- ODD - Der erste Durchgang des Roboters bewegt sich vom Eckpunkt 1 weg (Standardeinstellung).
-
- EVEN - Der erste Durchgang des Roboters bewegt sich zum Eckpunkt 1.
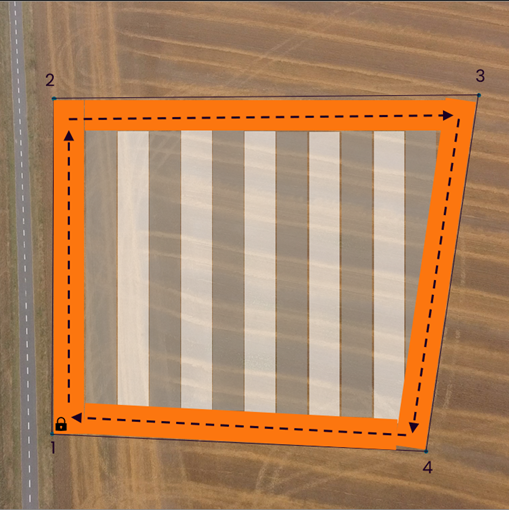
- Das Feld hat 4 Eckpunkte
- Die Referenzlinie wird von CP1 auf CP2 gesetzt
- Der Roboter startet seinen Einsatz von CP1


-
SEEDING DIRECTION
Wähle die Richtung für den Robotereinsatz im Vorgewende:-
POSITIV: Der Roboter fährt in aufsteigender Reihenfolge zum nächsten Eckpunkt.
-
NEGATIV: Der Roboter fährt in absteigender Reihenfolge zum nächsten Eckpunkt.
Siehe die Abbildung unten zur Verdeutlichung:
-

-
SICHERHEITSZONE
Weitere Einzelheiten findest du in dem entsprechenden Artikel - Sicherheitszone -
ÜBERSCHNEIDUNG VON SAATGUT UND UNKRAUT
Weitere Einzelheiten findest du in dem entsprechenden Artikel - Überschneidungen bei Aussaat und Unkrautbekämpfung
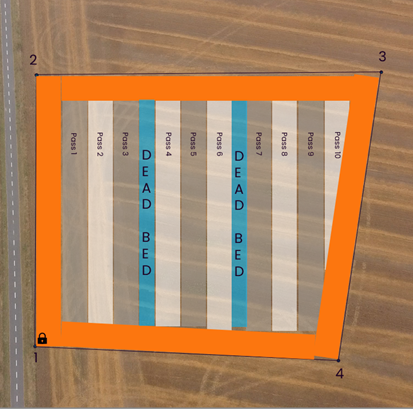
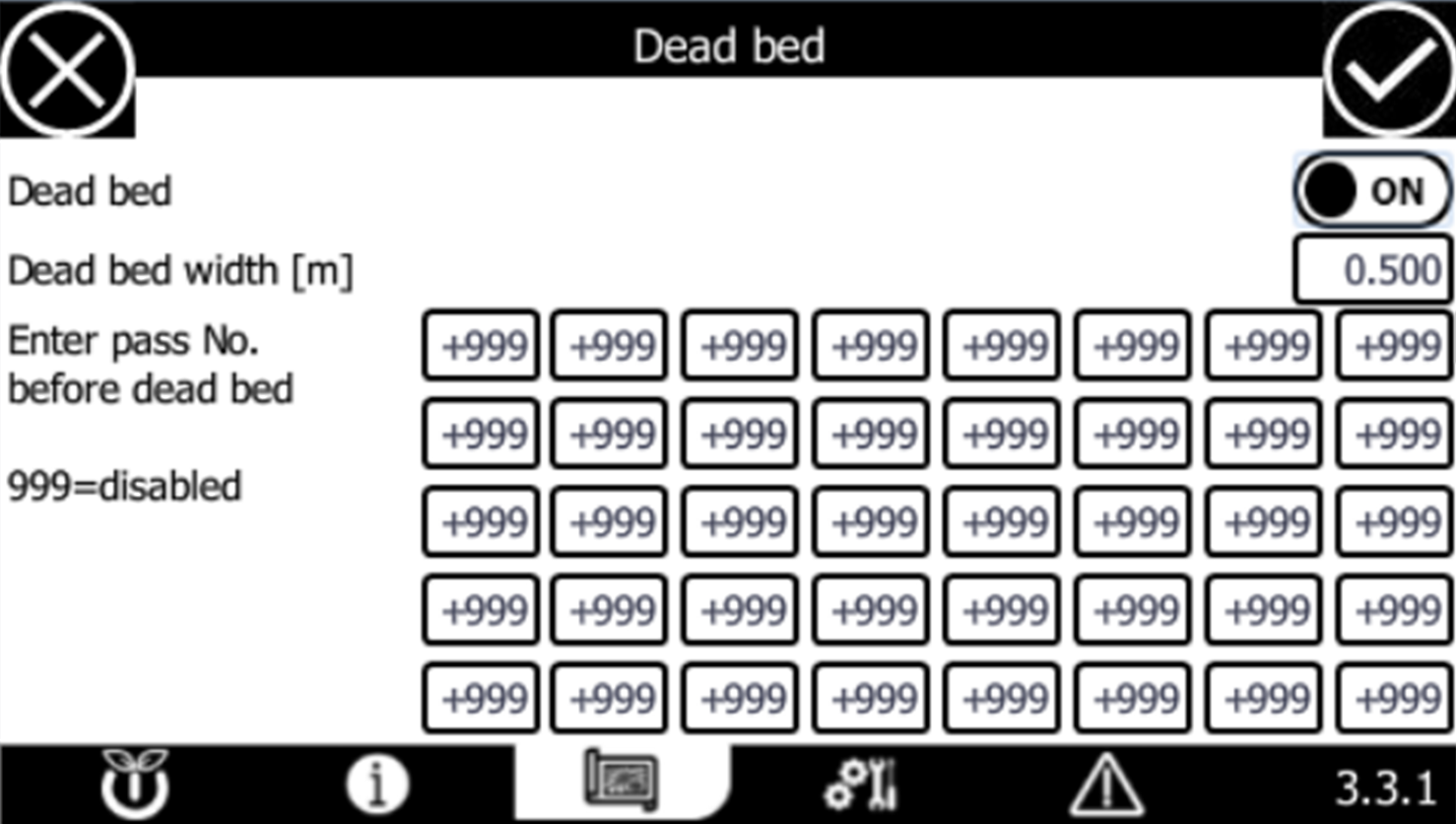
HMI SEITE 3.3.1 - TOTES BETT
-
TOTES BETT
Mit dieser Einstellung kannst du tote Betten im Feld aktivieren oder deaktivieren.
-
TOTBETTBREITE [M]
Gib die Breite eines einzelnen Beetes ein (in Metern).
-
PASS-NR. EINGEBEN VOR DEM TOTENBETT
Du kannst bis zu 40 tote Beete pro Feld anlegen.
Gib in das Raster die Nummer des Passes ein, der vor jedem Totbett steht. Um ein bestimmtes totes Bett zu deaktivieren, gib "999" ein.Zur Verdeutlichung siehe das folgende Beispiel: