
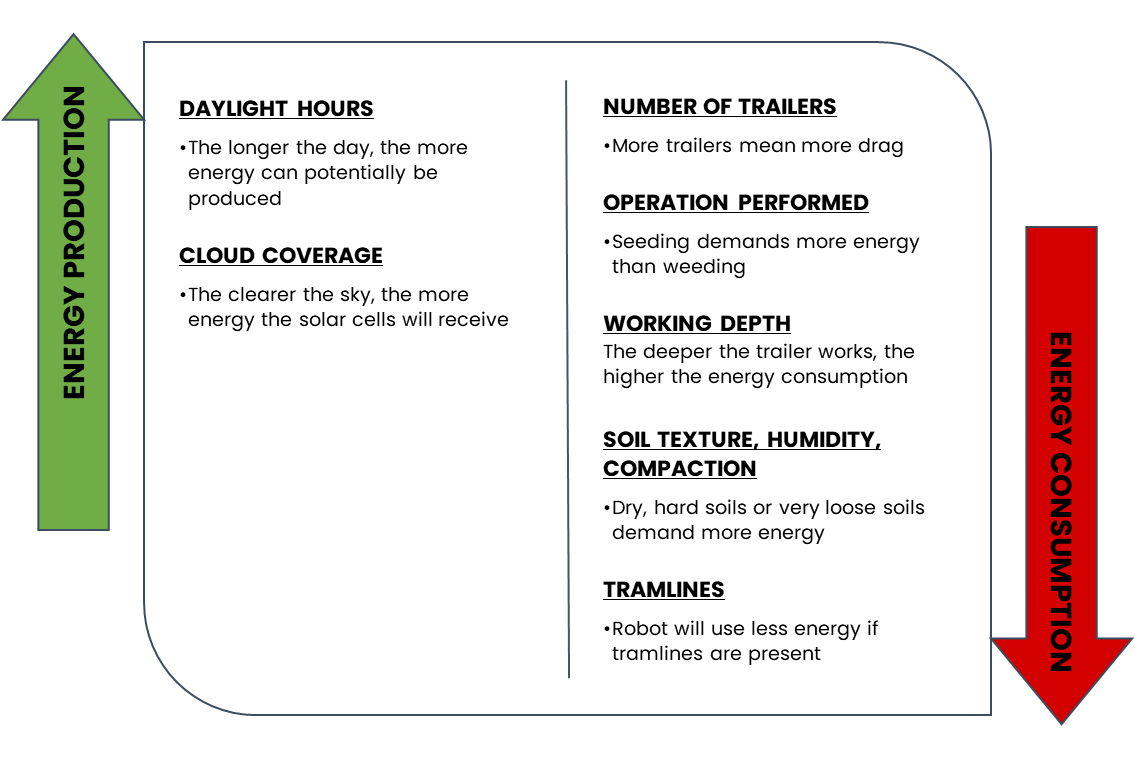
The FD20’s runtime depends on the balance between the solar panels’ energy generation and the robot’s power consumption while operating in the field.
Several operational and environmental factors affect this balance, as outlined in the following chart:
The following guidelines illustrate typical operating hours for the robot. Actual performance may differ based on site-specific variables, such as soil characteristics and the amount of effective sunlight on any given day.
|
Europe |
Wh production |
Runtime - Hours @ 600w |
Runtime - Hours @ 500w |
Runtime - Hours @ 375w |
||||
|
Best |
Avg. |
Best |
Avg. |
Best |
Avg. |
Best |
Avg. |
|
|
Medio March |
8000-9000 |
4000-5000 |
13-14 |
6-8 |
16-18 |
8-10 |
21-24 |
11-13 |
|
Medio April |
12000-13500 |
7000-8000 |
19-22 |
11-13 |
>24 |
14-16 |
>24 |
19-21 |
|
Medio May |
14500-15000 |
App. 9000 |
23-24 |
App. 14 |
>24 |
App. 18 |
>24 |
>24 |
You can monitor the solar panels’ energy production by accessing the charge controllers through the smartphone app (Link: Monitor the status of solar panels and batteries). By comparing real-time solar output and the current robot status to the chart above, you can estimate the FD20’s uptime.
Below are typical power consumption values for common FD20 operations:
- Seeding with new track creation: approximately 500–600 W
- Blind weeding in established tracks: approximately 375–500 W
- In-row weeding in established tracks: approximately 375–600 W
Actual runtime will vary based on several factors, so the values provided should be used as general guidance.
TIPS AND TRICKS 😉👍
To improve the autonomous driving of your FD20, make sure to:
- Run the robot across the field once prior to seeding. This enables the FD20 to establish tramlines, optimizing its autonomous navigation during seeding operations.
- Remove any passive trailers before initiating seeding to reduce the overall weight and enhance energy efficiency.
- Check tire pressure to ensure optimal grip for the rear wheels.
- Check the working depth of the trailers to prevent unnecessary drag.
- Clean the solar panel to maximize the droid’s charging capacity.
