Une fois que vous avez effectué les étapes du guide - CRÉER UN CHAMP 1/2vous pouvez procéder au réglage des paramètres opérationnels de votre robot.
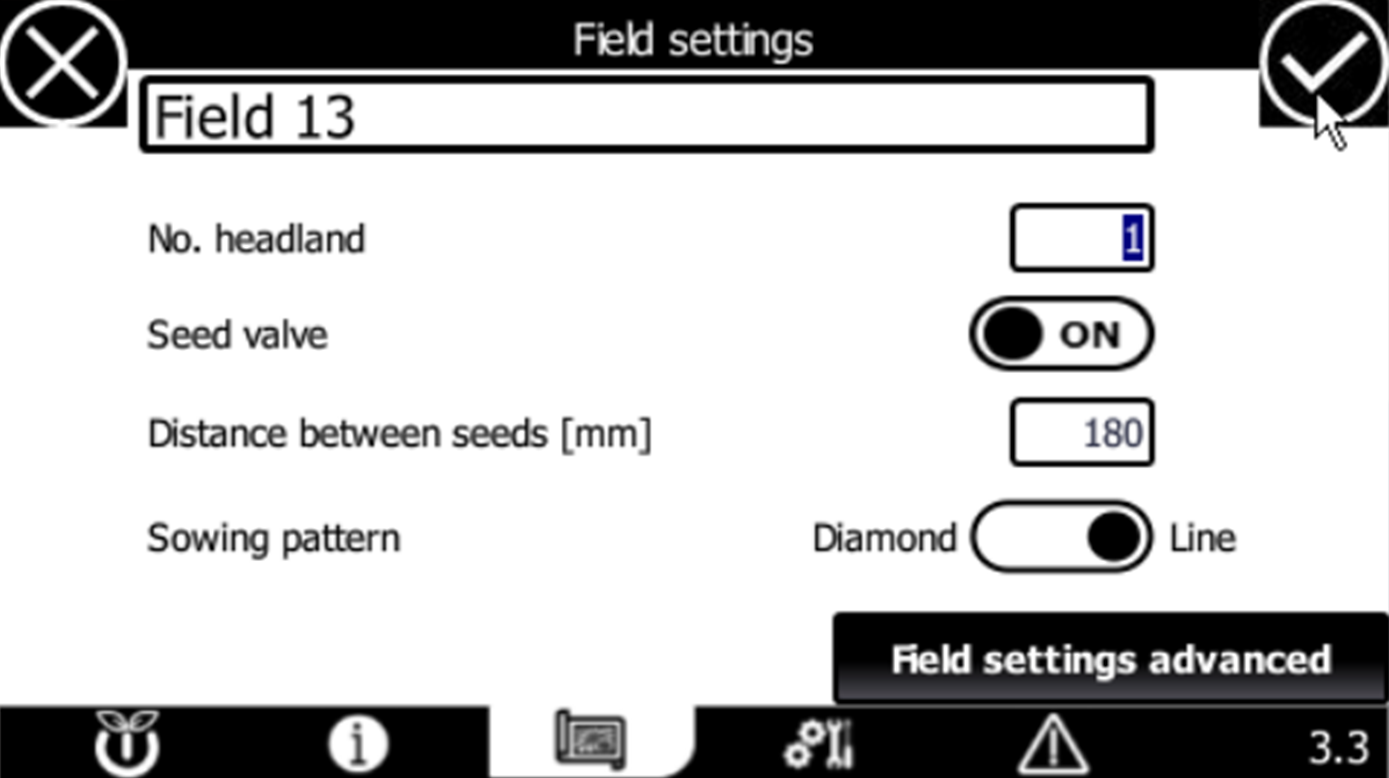
HMI PAGE 3.3 - FIELD SETTINGS
-
NON. LIEUX DE TÊTE
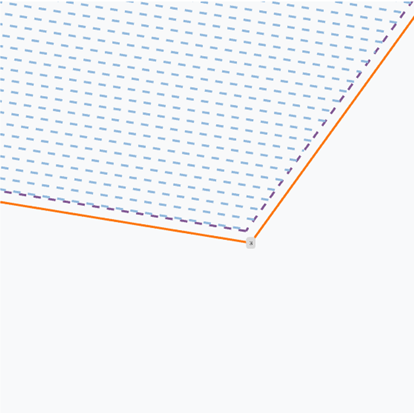
Définissez le nombre de tournières pour déterminer combien de fois le robot doit faire le tour du périmètre du champ. Ce paramètre détermine la largeur de la zone de fourrière, ce qui permet de laisser suffisamment d'espace entre le bord du champ et les rangées de cultures pour des tâches telles que la rotation des machines de récolte.
Les images ci-dessous présentent des exemples pratiques :
| NON. TÊTES : 6 | NON. TÊTES : 2 | NON. TÊTES : 1 |
 |
 |
 |
-
VALVE DE SEMENCE
Ce paramètre vous est fourni par FarmDroid dans le cadre de la certification de votre test de semences.
-
Valve de semis ON : La vanne de semis s'ouvre et se ferme automatiquement pour une précision optimale de l'ensemencement. Utilisez ce réglage lorsque vous semez par portions, par exemple lorsque la distance entre les rangs est supérieure à 3-4 cm.
-
Soupape de semence désactivée : la soupape de semence reste ouverte en permanence. N'utilisez ce réglage que pour les semis à très haute densité, par exemple lorsque la distance entre les rangs est de 2 à 3 cm.
-
-
DISTANCE ENTRE LES GRAINES (MM)
Définir la distance (en millimètres) entre les graines d'une même rangée.
NOTE 😀👍👍
Pour permettre le désherbage entre les rangs, la distance minimale entre les graines doit être d'au moins 100 millimètres.
-
SCHÉMA DE SEMIS
Vous pouvez personnaliser le schéma de semis en fonction de la culture spécifique que vous plantez.


HMI PAGE 3.3 - FIELD SETTINGS ADVANCED
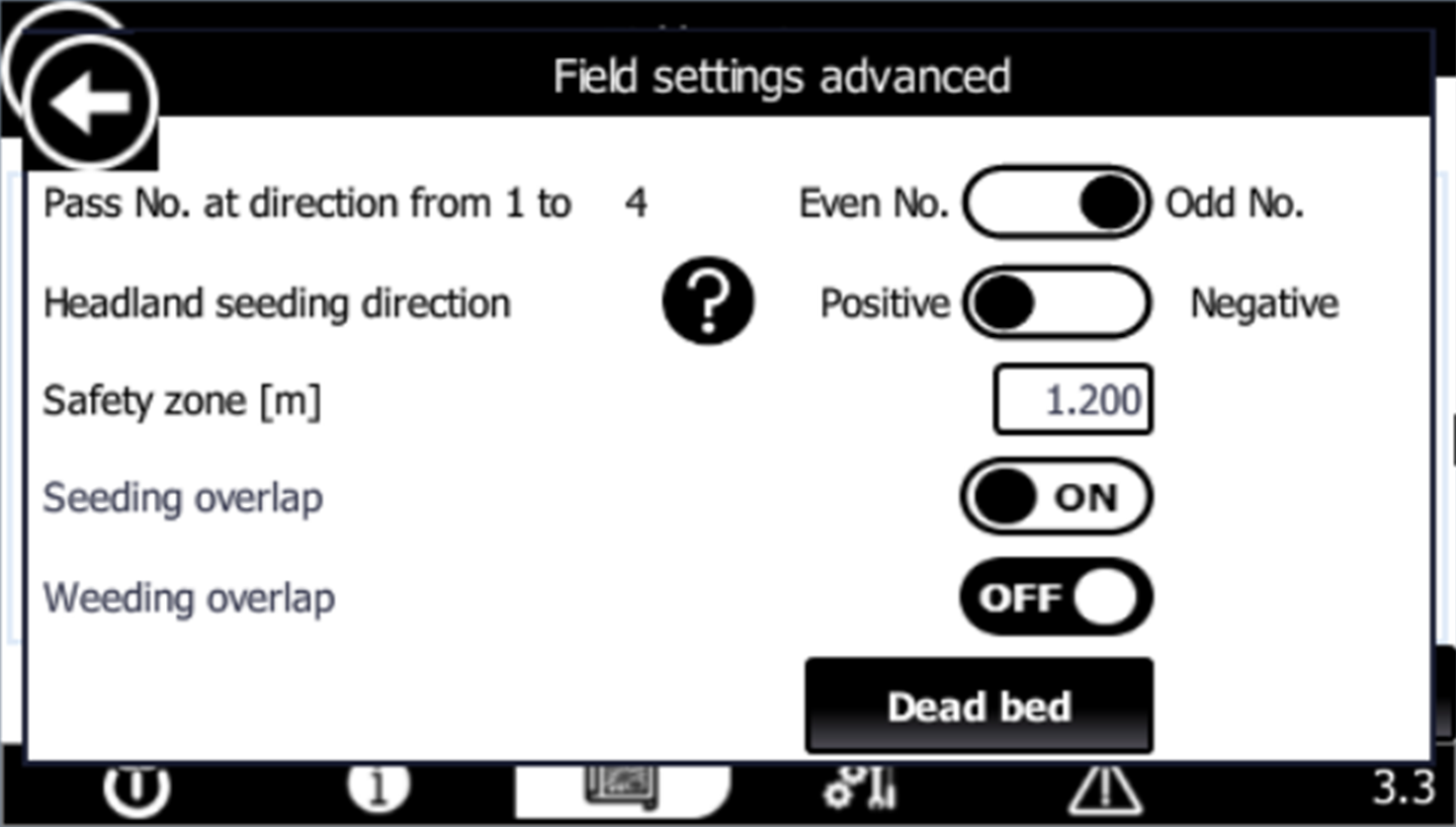
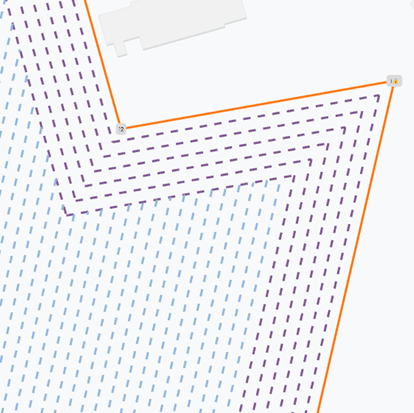
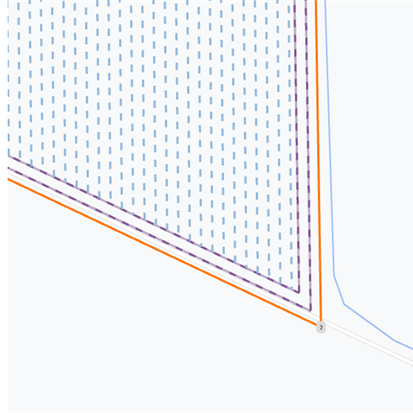
- PASSER NO. À LA DIRECTION DE 1 À (POINT D'ANGLE DE RÉFÉRENCE)
Choisissez la direction souhaitée pour le premier passage du robot :- ODD - La première passe du robot s'éloigne du point de corner 1 (réglage standard).
-
- EVEN - La première passe du robot se dirige vers le point de corner 1.
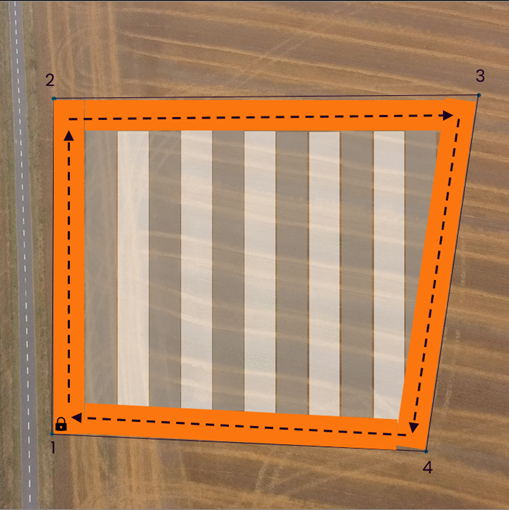
- Le champ a 4 points d'angle
- La ligne de référence est réglée de CP1 à CP2.
- Le robot commence son opération à partir de CP1


-
DIRECTION DE L'ENSEIGNEMENTEN FÊTE
Choisissez la direction dans laquelle le robot doit opérer dans la tournière :-
POSITIF : Le robot se déplace vers le point d'angle suivant dans l'ordre croissant.
-
NÉGATIF : Le robot se déplace vers le point d'angle suivant dans l'ordre décroissant.
Voir l'illustration ci-dessous pour plus de clarté :
-

-
ZONE DE SÉCURITÉ
Pour plus de détails, voir l'article dédié - Zone de sécurité -
L'ENSEMENCEMENT ET LE CHEVAUCHEMENT DE L'ENSEMENCEMENT
Pour plus de détails, voir l'article dédié - Chevauchement des semis et des désherbages
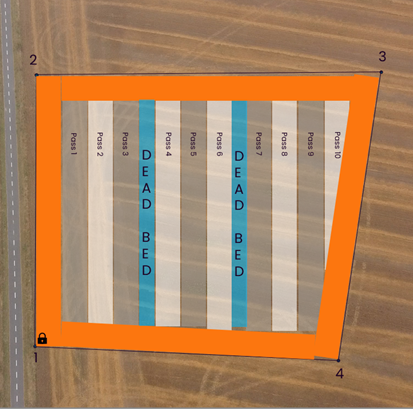
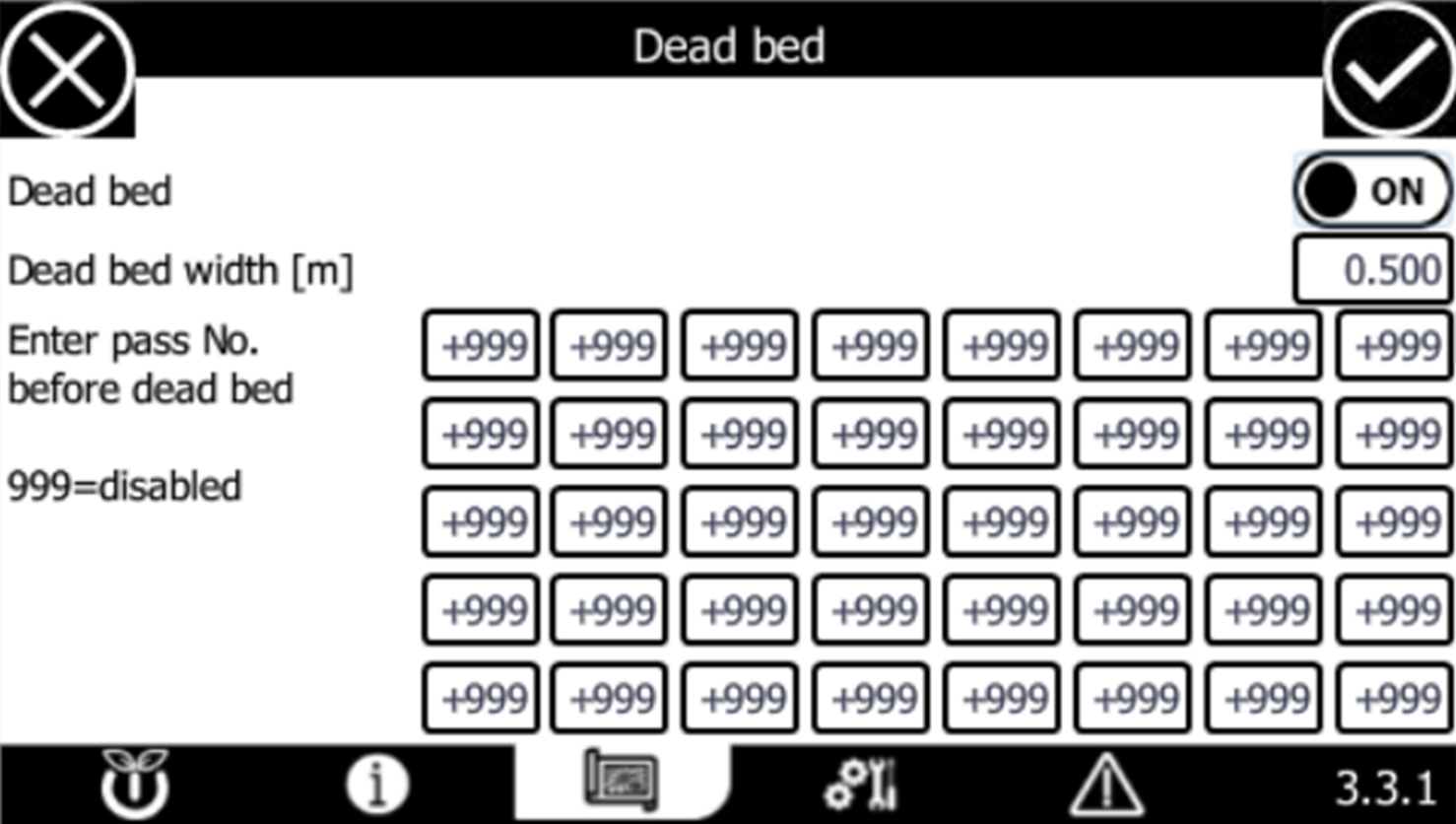
HMI PAGE 3.3.1 - LIT MORT
-
LIT MORT
Ce paramètre permet d'activer ou de désactiver les lits morts dans le champ.
-
LARGEUR DU LIT MORT [M]
Indiquer la largeur d'un lit mort simple (en mètres).
-
ENTER PASS NO. AVANT LE LIT MORT
Vous pouvez définir jusqu'à 40 lits morts par champ.
Dans la grille, entrez le numéro de passage qui précède chaque lit mort. Pour désactiver un lit mort spécifique, entrez "999".Pour plus de précisions, voir l'exemple ci-dessous :