Nadat je de stappen uit de gids hebt uitgevoerd - VELD 1/2 AANMAKENhebt uitgevoerd, kunt u de operationele instellingen voor uw robot aanpassen.
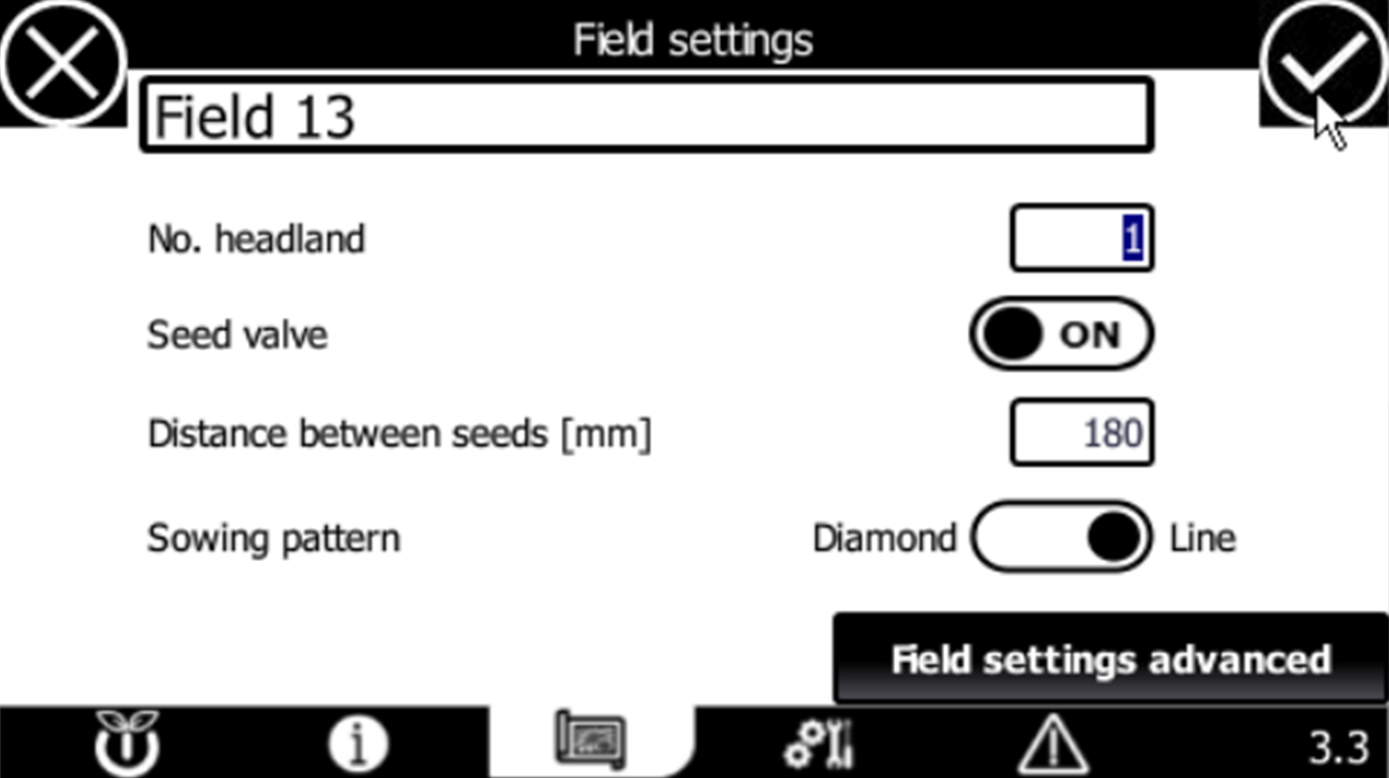
HMI PAGINA 3.3 - VELDINSTELLINGEN
-
NEE. HOOFDLANDS
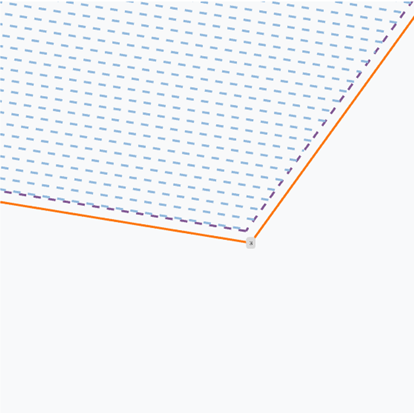
Stel het aantal kopakkers in om te bepalen hoe vaak de robot rond de omtrek van het veld moet rijden. Deze instelling bepaalt de breedte van het gebied op de kopakker, zodat er genoeg ruimte overblijft tussen de rand van het veld en de rijen gewassen voor taken zoals het draaien van oogstmachines.
Raadpleeg de onderstaande afbeeldingen voor praktische voorbeelden:
| NEE. HOOFDLANDEN: 6 | NEE. HOOFDLANDEN: 2 | NEE. HOOFDLANDEN: 1 |
 |
 |
 |
-
ZUIDKLEP
Deze instelling krijg je van FarmDroid als onderdeel van je zaadtestcertificering.
-
Zaaiklep AAN: De zaaiklep opent en sluit automatisch voor een optimale zaainauwkeurigheid. Gebruik deze instelling bij het zaaien in porties, zoals wanneer de afstand tussen de rijen groter is dan 3-4 cm.
-
Zaaiklep UIT: De zaaiklep blijft altijd open. Gebruik deze instelling alleen voor zaaien met een zeer hoge dichtheid, zoals wanneer de afstand tussen de rijen 2-3 cm is.
-
-
AFSTAND TUSSEN ZADEN (MM)
Stel de afstand (in millimeters) in tussen de zaden binnen dezelfde rij.
OPMERKING 😀👍
Om onkruid tussen de rijen te kunnen wieden, moet de minimale afstand tussen de zaden ten minste 100 millimeter zijn.
-
ZAAIEN PATROON
Je kunt het zaaipatroon aanpassen aan het specifieke gewas dat je plant.


HMI PAGINA 3.3 - GEAVANCEERDE VELDINSTELLINGEN
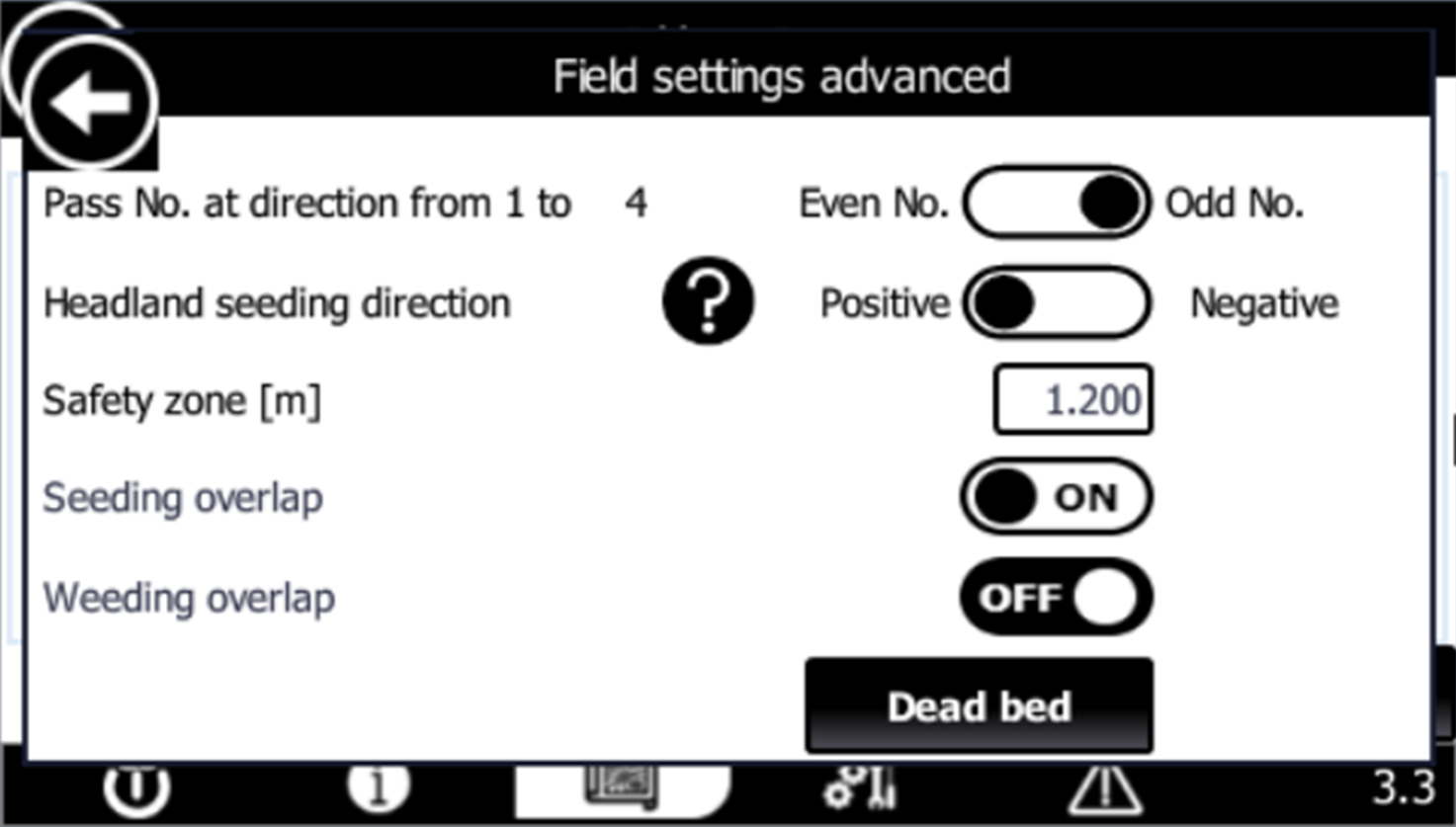
- PASS NO. IN RICHTING VAN 1 TOT (REFERENTIE HOEKPUNT)
Kies de gewenste richting voor de eerste robotbeweging:- ODD - De eerste pas van de robot beweegt weg van hoekpunt 1 (standaardinstelling).
-
- EVEN - De eerste pas van de robot gaat richting hoekpunt 1.
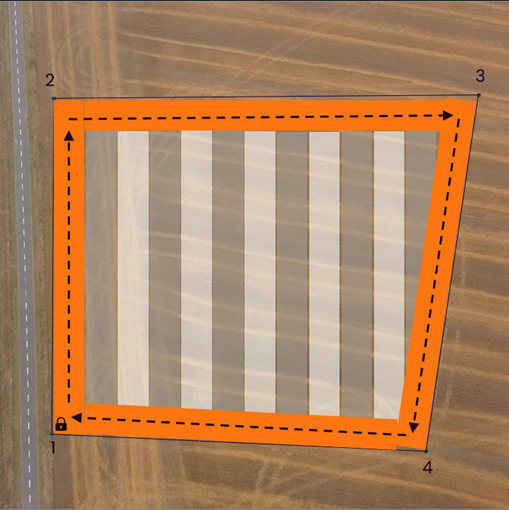
- Het veld heeft 4 hoekpunten
- De referentielijn wordt ingesteld van CP1 naar CP2
- De robot start zijn werkzaamheden vanaf CP1


-
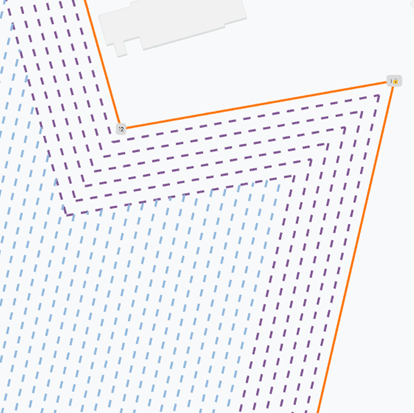
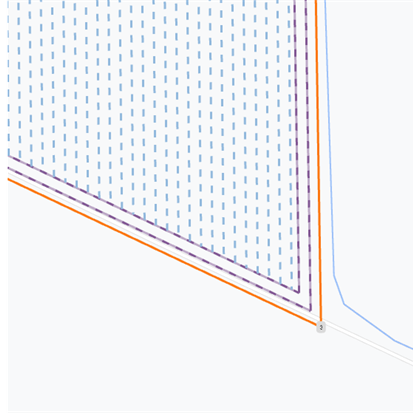
ZEEFRICHTING HEADLAND
Kies de richting waarin de robot moet werken in de kopakker:-
POSITIEF: De robot gaat naar het volgende hoekpunt in oplopende volgorde.
-
NEGATIEF: De robot beweegt naar het volgende hoekpunt in aflopende volgorde.
Zie de onderstaande illustratie voor verduidelijking:
-

-
VEILIGHEIDSZONE
Raadpleeg voor meer informatie het speciale artikel - Veiligheidszone -
ZAAIEN EN WIEDEN OVERLAPPEN
Raadpleeg voor meer informatie het speciale artikel - Zaaien en wieden overlappen
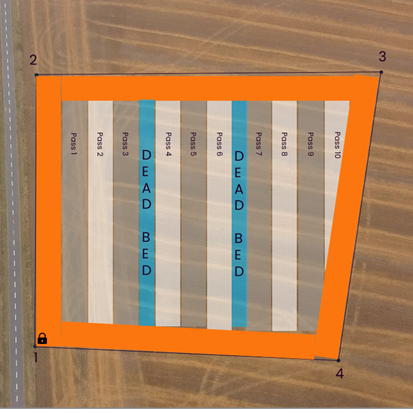
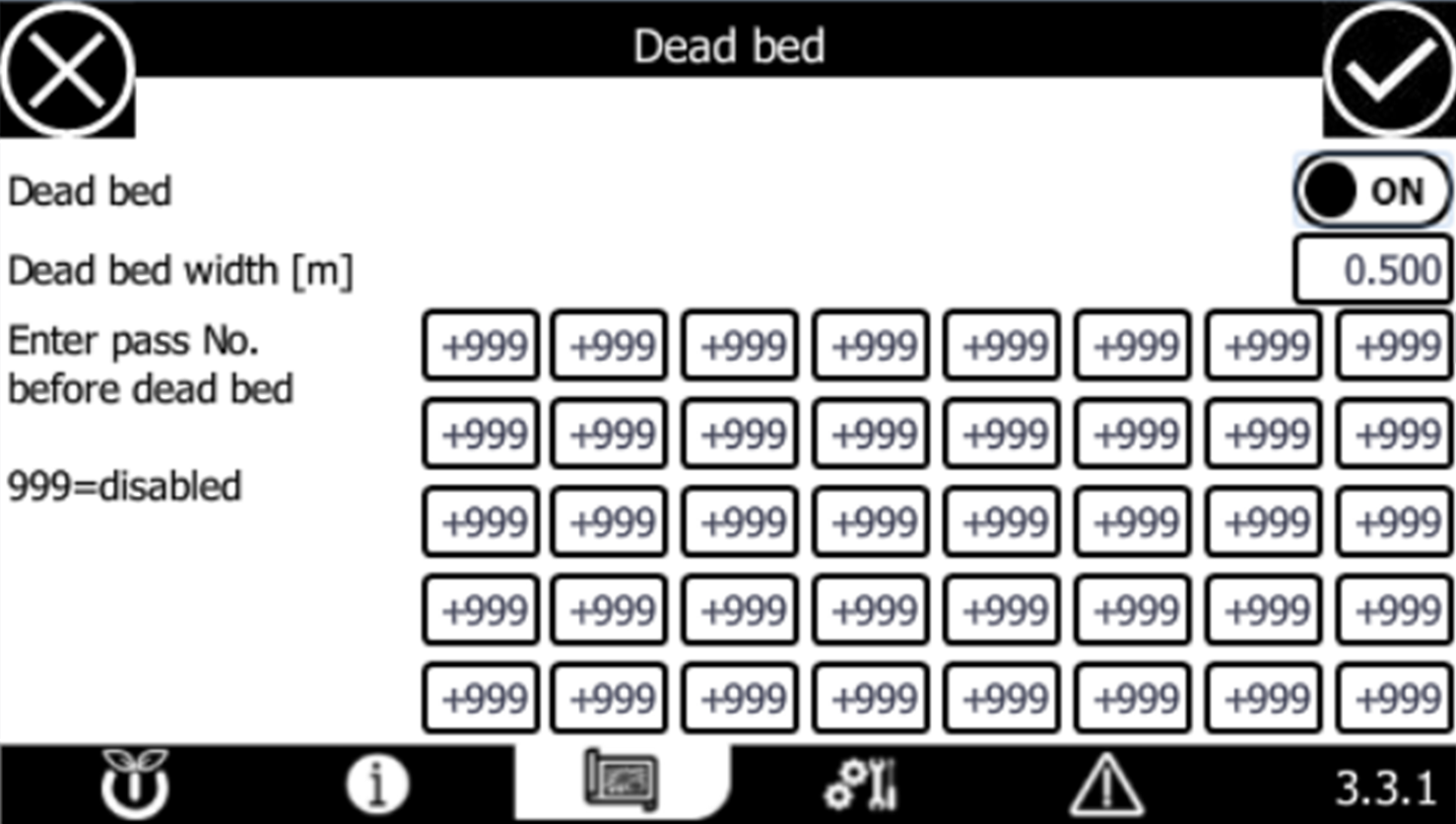
HMI PAGINA 3.3.1 - DOOD BED
-
DOOD BED
Gebruik deze instelling om dode bedden binnen het veld in of uit te schakelen.
-
DODE BEDDING BREEDTE [M]
Voer de breedte van een enkel dood bed in (in meters).
-
ENTER PASS NO. VOOR DOOD BED
Je kunt tot 40 dode bedden per veld instellen.
Voer in het raster het pasnummer in dat voor elk dood bed staat. Om een specifiek dood bed te deactiveren, voer je "999" in.Zie het onderstaande voorbeeld ter verduidelijking: